Генератори чангкашаки ду ангушти нарми пневматикии муштарак барои автоматикунонии роботҳо



Генератори чангкашаки ду ангушти нарми пневматикии муштарак барои автоматикунонии роботҳо
Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза

Дастгирҳои роботии силсилаи SCIC Z-EFG андозаи хурд доранд ва дорои системаи дарунсохти серво мебошанд, ки имкон медиҳад, ки суръат, мавқеъ ва қувваи фишурда дақиқ назорат карда шавад. Системаи пешрафтаи фишурдасозии SCIC барои роҳҳои ҳалли автоматикунонӣ ба шумо имкон медиҳад, ки имкониятҳои навро барои автоматикунонии вазифаҳое, ки шумо ҳеҷ гоҳ имконнопазир меҳисобидед, кушоед.
Хусусият
· Зарбаи калон
· Қувваи фишурдани танзимшаванда ва зарбаи танзимшаванда
· Мӯҳлати дароз: даҳҳо миллион давра, аз чанголҳои ҳавоӣ зиёдтар аст
· Контроллери дарунсохт: андозаи хурд, ҳамгироии осон
·Идоракунии автобуси EIA485, вуруд/хуруҷ
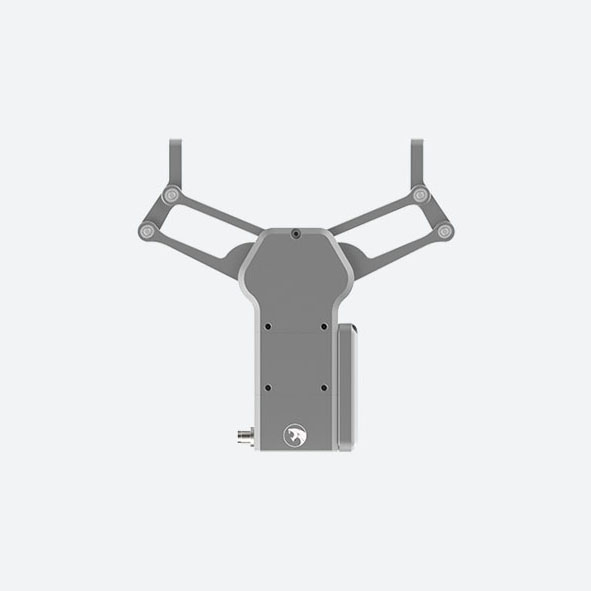
Қувваи фишурдакунӣ: 40-130N, шакли Y-и дастаки барқӣ бо зарбаи 120 мм
Зарбаи дароз
Зарбаи умумӣ: 120 мм
Реҷаи идоракунӣ
485 Modbus, EIA485, Идоракунии автобус
Қувваи фишурдакунӣ
Қувваи фишурдакунӣ 40-130N танзимшаванда
Контроллер дар дохил
Табдил додани майдони хурд, ҳамгироӣ осон аст
Назорати дақиқӣ
Такроршавандагӣ: ±0.02 мм
Часпондани нарм
Он метавонад ашёҳои нозук ва деформатсияшавандаро часпак кунад

● Пешбурди инқилоб дар иваз кардани фишангҳои пневматикӣ бо фишангҳои барқӣ, аввалин фишанги барқӣ бо системаи сервои муттаҳидшуда дар Чин.
● Ивазкунии комил барои компрессори ҳаво + филтр + клапани электромагнитӣ + клапани дросселӣ + дастаки пневматикӣ
● Мӯҳлати хидматрасонии якчанд давра, ки бо силиндраи анъанавии Ҷопон мувофиқ аст



Параметри мушаххасот
| Рақами модел Z-EFG-130 | Параметрҳо |
| Ҷамъ сакта | 120 мм |
| Қувваи фишурда | 40-130N |
| Такрорпазирӣ | ±0.02 мм |
| Вазни тавсияшудаи часпак | Ҳадди аксар 1 кг |
| Интиқол режим | Гайкаи винтӣ + пайванд |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.9с |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80(Сармо нест) |
| Реҷаи ҳаракат | Пайванд |
| Назорати зарба | Танзимшаванда |
| Танзими қувваи фишурдан | Танзимшаванда |
| Вазн | 0.8 кг |
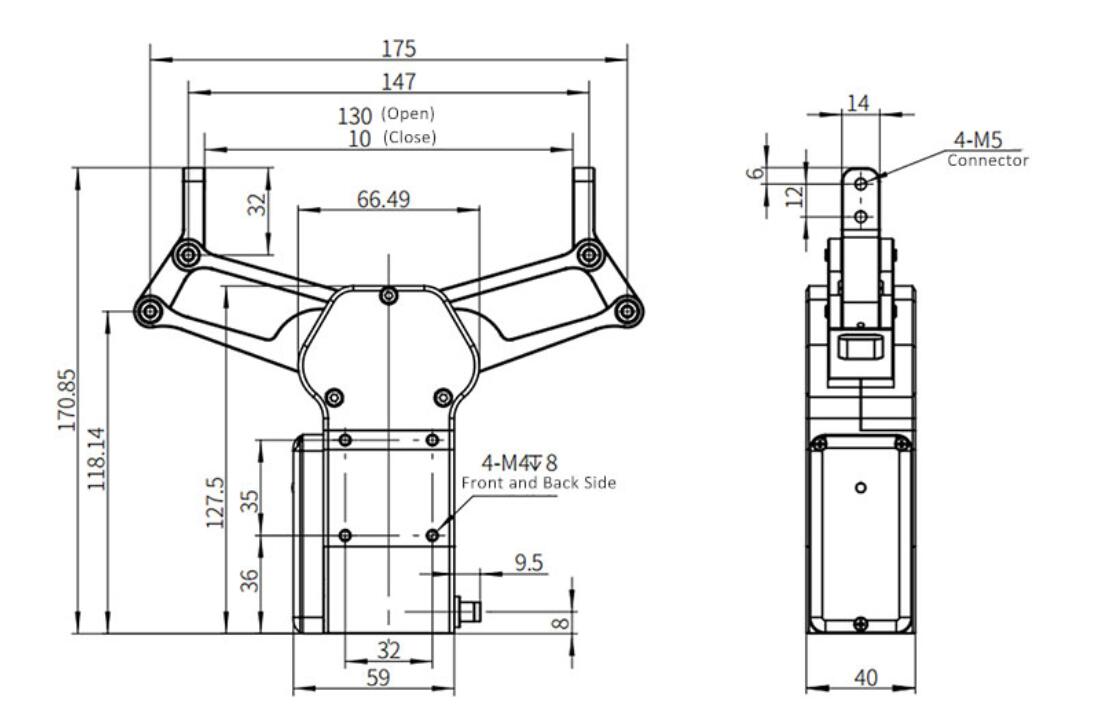
| Андозаҳо(Ч*Ч*Б) | 171*187*40мм (кушода) 218*66.5*40м (пӯшида) |
| Ҷойгиркунии контроллер | Дарунсохт |
| Қудрат | 10 Вт |
| Навъи муҳаррик | Бе хасу DC |
| Ҷараёни авҷӣ | 2A |
| Шиддати номиналӣ | 24В |
| Ҷараёни интизорӣ | 0.4A |
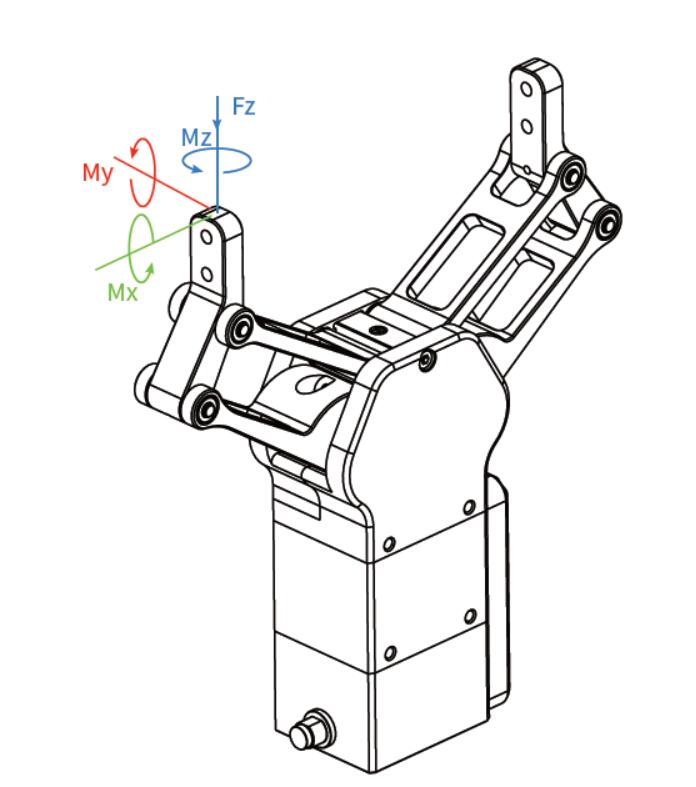
| Бори статикии иҷозатдодашуда дар самти амудӣ | |
| Фз: | 200N |
| Моменти гардиши иҷозатдодашуда | |
| Мкс: | 2 Нм |
| Ман: | 2 Нм |
| Мз: | 2 Нм |
Пайваст ва бозӣ кунед, қулай барои ҳамгироӣ
Дастгири барқии Z-EFG-130 метавонад бо бозуи роботи ҳамкорӣ мувофиқ бошад ва дар дохили он системаи сервои ҳамгирошуда мавҷуд аст, танҳо як дастгир метавонад ба компрессор + филтр + клапани соленоид + клапани дросселӣ + дастгири ҳавоӣ баробар бошад.


Зарбаи тӯлонӣ, мутобиқати олӣ
Зарбаи самараноки дастаки барқӣ метавонад то 120 мм бошад, андозаи басташавии он 10 мм аст ва дастаки барқиро барои чипҳои нимноқилӣ, электроникаи 3C ва дигар соҳаҳои дақиқ ва ғайра истифода бурдан мумкин аст.
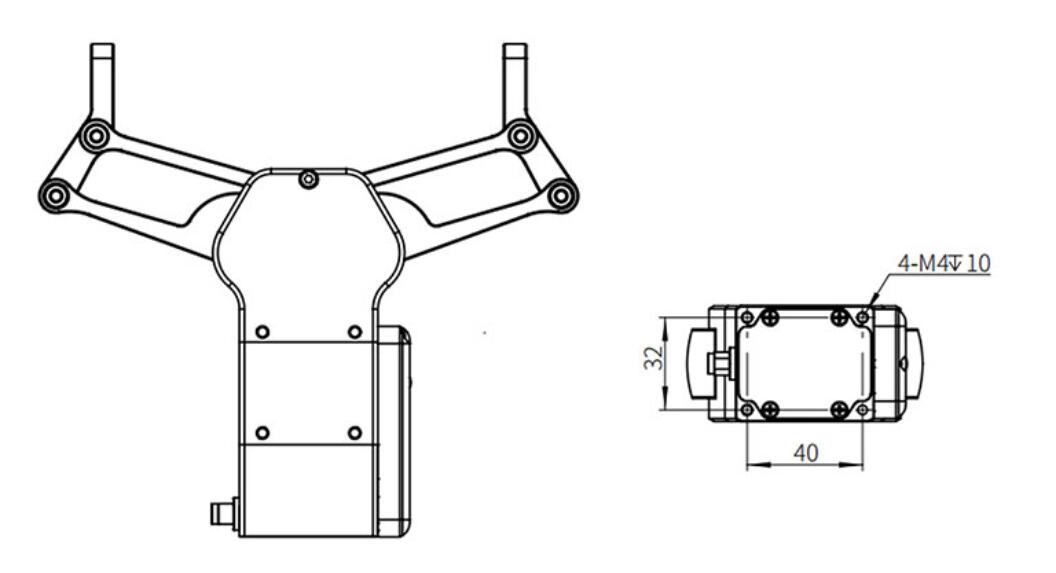
Андозаи хурд, қулай барои ҳамгироӣ

Андозаи кушодагии Z-EFG-130 171*187*40мм ва андозаи басташавӣ 218*66.5*40мм аст, он сохтори паймон дорад, намудҳои гуногуни насбкуниро дастгирӣ мекунад, он дар дохил контроллер аст ва масоҳати хурдро фаро мегирад.

Назорати қувваи дақиқӣ
Дастгоҳи барқӣ аз тарҳи махсуси интиқол ва ҷуброни алгоритми гардонанда истифода мебарад, қувваи фишурдакунӣ 40-130N танзимшаванда аст, вазни фишурдакунӣ ≤1kg аст ва он метавонад такрори ± 0.02mm-ро таъмин кунад.
Дастгирии мутобиқшаванда, думаш ивазшаванда

Дастаки барқии Z-EFG-130 фишурдани мутобиқшавандаро дастгирӣ мекунад, он барои ашёи даврашакл, курашакл ё шакли махсус мувофиқтар аст, қисмҳои думашро ба осонӣ иваз кардан мумкин аст, муштариён метавонанд ашёро мувофиқи талаботи худ фишурда кунанд.


Режимҳои идоракунии сершумор, осон истифодашаванда

Дастгири барқӣ метавонад аз ҷониби Modbus дақиқ идора карда шавад, конфигуратсияи он содда аст, барои истифодаи протоколи муоширати рақамии вуруд/хуруҷ, танҳо як сим барои пайвастшавӣ бо фурӯзон/хомӯш кардан лозим аст, он бо системаи идоракунии асосии PLC мувофиқ аст.
Ҷойивазкунии Маркази Вазни Бор
Тиҷорати мо


Категорияҳои маҳсулот
-

Роботи саноатии 6 меҳварӣ бо нархи рақобатпазир ...
-

Тухми баландсуръати саноатӣ барои чидан ва ҷойгир кардани меваҳои тухмӣ 4 ...
-

Добот шаш меҳвари муштараки роботи дастӣ бо артикулаи...
-

Манипулятори телескопии артиши дастаки роботии дароз 20...
-
Роботи механикии 6-меҳварии дастӣ бо фурӯши гарми робот ...
-

Мошини саноатӣ Робот Дасти 4-меҳварӣ Манипулятор...