СИЛСИЛАИ ГИППЕРҲОИ ЭЛЕКТРИКИИ HITBOT – ГИППЕРИ ЭЛЕКТРИКИИ СЕЛСИЛАИ Z-ECG-10




Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза

Хусусият

·Муайян кардани афтиши фишанг, функсияи баромади майдон
·Қувва, мавқеъ, суръатро идора кардан мумкин аст, назорати дақиқ тавассути Modbus
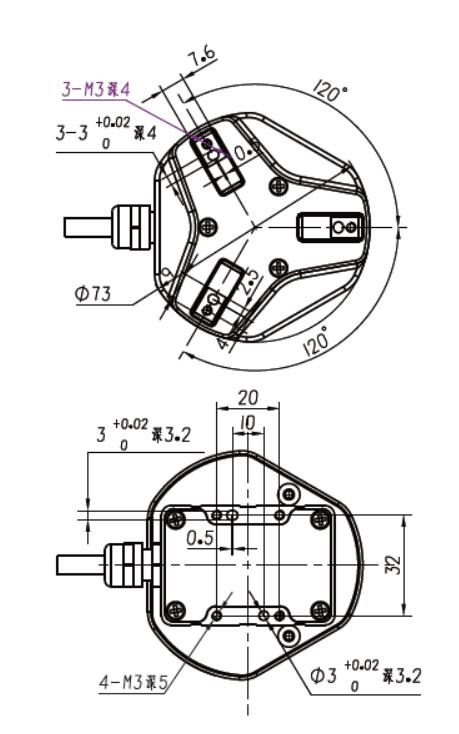
·Дастгири марказии се ангушт
·Контроллери дарунсохт: фазои хурд, ҳамгироии осон
·Реҷаи идоракунӣ: 485 (Modbus RTU), вуруд/хуруҷ
Дастаки электрикии сеангуштӣ, ки ашёи силиндрро ба осонӣ маҳкам мекунад
Самаранокии баланд
Қувваи фишурдакунӣ: 3-10N,
Зичии баланди энергия
Дақиқӣ барои назорат
Онро Modbus идора карда метавонад
Оқилона ба фикру мулоҳиза
Он дорои функсияи pf барои ошкор кардани тарки фишор дар баромади минтақавӣ мебошад.
Контроллери дарунсохт
Фазои хурд, ба осонӣ ба ҳам пайваст карда мешавад.
Режимҳои бисёрҷониба
Дастгирии вуруд/хуруҷи 485 (Modbus)
Гирандаи сеангушт
Се ангушт барои часпидан, барои мавридҳои гуногун мувофиқ аст




Параметри мушаххасот
| Рақами модел Z-ECG-10 | Параметрҳо |
| Ҷамъ сакта | 10 мм |
| Қувваи фишурда | 3-10N |
| Такрорпазирӣ | ±0.03 мм |
| Вазни тавсияшудаи часпак | Ҳадди аксар 0.2 кг |
| Интиқол режим | Роҳи оҳани роҳнамои рейка ва пиньон + тӯбча |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.3с |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80(Сармо нест) |
| Сиёҳчатоб | Як тараф: 0.2 мм |
| Назорати зарба | Танзимшаванда |
| Танзими қувваи фишурдан | Танзимшаванда |
| Вазн | 0.5 кг |
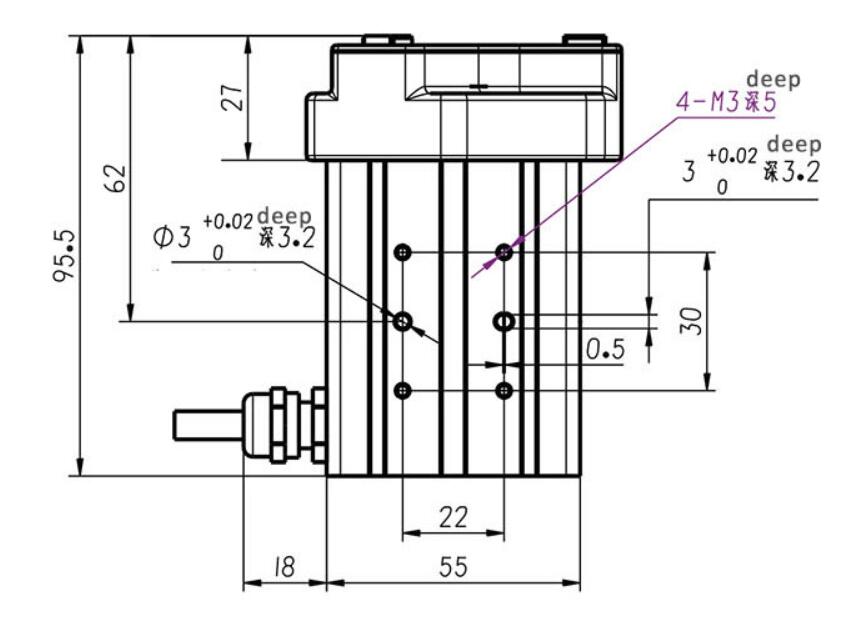
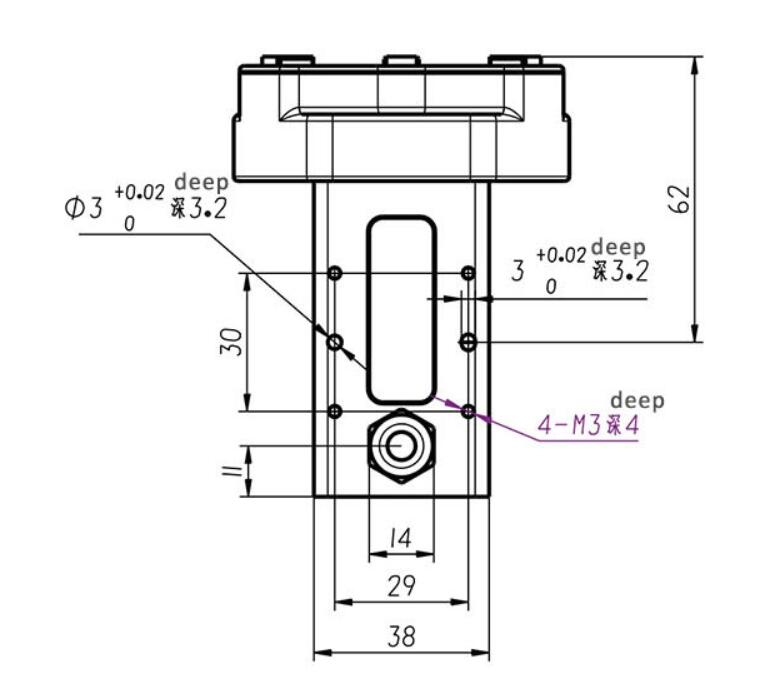
| Андозаҳо(Ч*Ч*Б) | 73*73*95.5мм |
| Синфи ҳимоя | IP20 |
| Навъи муҳаррик | Мотори барқии серво |
| Ҷараёни авҷӣ | 0.6A |
| Шиддати номиналӣ | 24В ±10% |
| Ҷараёни интизорӣ | 0.3A |
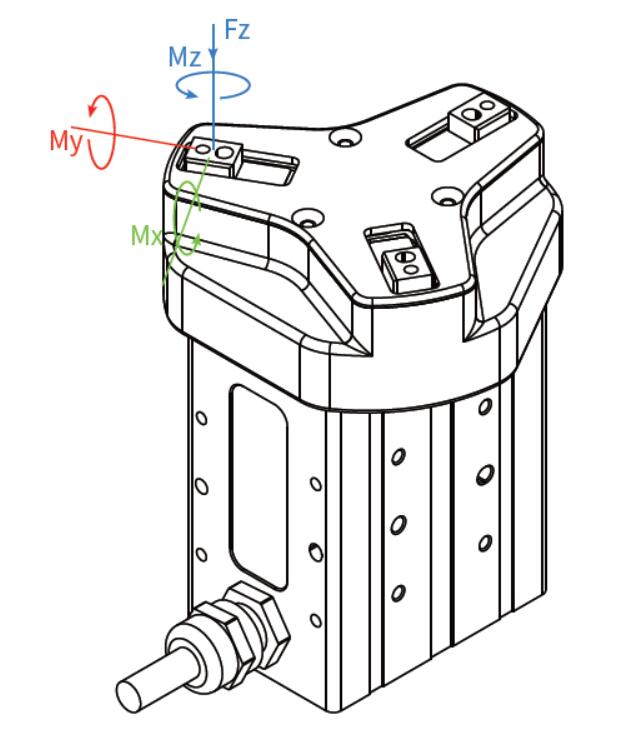
| Бори статикии иҷозатдодашуда дар самти амудӣ | |
| Фз: | 70N |
| Моменти гардиши иҷозатдодашуда | |
| Мкс: | 0.64 Нм |
| Ман: | 0.4 Нм |
| Мз: | 0.48 Нм |
Дақиқӣ ба ҷойгиркунӣ, дастаки сеангуштӣ
Дастгоҳи сеанги электрикии Z-ECG-10, такроршавандагии он ±0.03 мм аст, он бо се ангушт фишурда мешавад ва функсияи муайянкунии афтиши фишурда ва баромади минтақавӣ дорад, ки метавонад барои фишурдани ашёи силиндр беҳтар бошад.


Контроллери дарунсохт, ҳамгироии баланд
Ҳифзи аъло барои аз ҳад зиёд боркунии фаврӣ, то боварӣ ҳосил кунад, ки дастаки барқӣ аз қатъ шудани система ё дигар ҳолатҳои ғайримуқаррарӣ эмин аст. Он дорои контроллери дарунсохт аст, қувва, бит ва суръатро метавон идора кард, фазои хурди кориро фаро мегирад ва ҳамгиро карданаш осон аст.
Шакли хурд, насб кардан чандир аст

Z-ECG-10 барои қабули навъи интиқоли раф ва пиньон + роҳнамои хаттӣ пешбинӣ шудааст, андозаи он L73*W73*H109, вазн танҳо 0.65 кг, сохтори он паймон аст, намудҳои сершумори насбкуниро дастгирӣ мекунад ва иҷрои бисёр вазифаҳои фишурдасозиро осон мекунад.


Зуд вокуниш нишон додан, дақиқӣ, назорати қувва
Кӯтоҳтарин зарба 0.3 сония, қувваи фишурдакунӣ 3-10Н, зарбаи фишурдакунӣ 10 мм ва вазн тақрибан 0.2 кг аст, ки метавонад дақиқии баландро барои фишурдакунӣ таъмин кунад.
Режимҳои идоракунии сершумор, осон истифодашаванда

Z-ECG-10 метавонад дақиқиро тавассути Modbus идора кунад, ҷудо кардани он осон аст, барои истифодаи коммуникатсияи рақамии вуруд/хуруҷ, танҳо як сим лозим аст, ки онро фаъол/хомӯш кунед ва он инчунин бо системаи асосии идоракунии PLC мувофиқ аст.

Ҷойивазкунии Маркази Вазни Бор
Тиҷорати мо


Категорияҳои маҳсулот
-

СИЛСИЯИ ГРАППЕРИ ЭЛЕКТРИКИ HITBOT - Z-EFG-26 Paral...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIES PGC –...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-FS Colla...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

СИЛСИЯИ ГРАППЕРИ ЭЛЕКТРИКИ HITBOT - Z-EFG-20 Парал...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...