СИЛСИЛАИ ГИППЕРҲОИ ЭЛЕКТРИКИИ HITBOT – ГИППЕРИ ЭЛЕКТРИКИИ ҲАМКОРИИ Z-EFG-R



Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза
Дастгирҳои роботии силсилаи SCIC Z-EFG андозаи хурд доранд ва дорои системаи дарунсохти серво мебошанд, ки имкон медиҳад, ки суръат, мавқеъ ва қувваи фишурда дақиқ назорат карда шавад. Системаи пешрафтаи фишурдасозии SCIC барои роҳҳои ҳалли автоматикунонӣ ба шумо имкон медиҳад, ки имкониятҳои навро барои автоматикунонии вазифаҳое, ки шумо ҳеҷ гоҳ имконнопазир меҳисобидед, кушоед.

Хусусият

·Дастгоҳи барқии серво-муҳаррики хурд, вале пуриқтидор.
·Терминалҳоро метавон барои қонеъ кардани талаботи гуногуни лоиҳа иваз кард.
·Метавонад ашёи нозук ва деформатсиониро, ба монанди тухм, найчаҳои озмоишӣ, ҳалқаҳо ва ғайра, барад.
·Барои манзараҳое, ки манбаъҳои ҳаво надоранд (масалан, лабораторияҳо ва беморхонаҳо), мувофиқ аст.
Системаи ҳамгирошудаи серво барои дархостҳои гуногун истифода мешавад
Қувваи бузурги фишурдакунӣ
Қувваи фишурдан: 80N,
зарба: 20 мм
Назорати дақиқӣ
Такроршавандагӣ: ±0.02 мм
Пайваст ва бозӣ кардан
Махсус тарҳрезӣ шудааст бароидастаки барқии шашмеҳварӣ
Контроллер дарунсохт аст
Фарогирии масоҳати хурд, қулай барои ҳамгироӣ.
Думи метавонад иваз карда шавад
Думи онро метавон барои дархостҳои гуногун истифода бурд.
Часпондани нарм
Он метавонад ашёи нозукро фишурда кунад

● Пешбурди инқилоб дар иваз кардани фишангҳои пневматикӣ бо фишангҳои барқӣ, аввалин фишанги барқӣ бо системаи сервои муттаҳидшуда дар Чин.
● Ивазкунии комил барои компрессори ҳаво + филтр + клапани электромагнитӣ + клапани дросселӣ + дастаки пневматикӣ
● Мӯҳлати хидматрасонии якчанд давра, ки бо силиндраи анъанавии Ҷопон мувофиқ аст




Параметри мушаххасот
Z-EFG-R як дастгоҳи барқии роботӣ бо контроллери дарунсохт ва якчанд функсия дар як вақт мебошад. Андозаи хурд, вале аз ҷиҳати функсия пурқувват аст.
● Дастгоҳи барқии хурд, вале пуриқтидори сервомуҳаррик.
●Терминалҳоро метавон барои қонеъ кардани талаботи гуногуни лоиҳа иваз кард.
● Метавонад ашёҳои нозук ва деформатсияшавандаро, ба монанди тухм, найчаҳои озмоишӣ, ҳалқаҳо ва ғайраро бардошта гирад.
● Барои манзараҳои бе манбаъҳои ҳаво (ба монанди лабораторияҳо ва беморхонаҳо) мувофиқ аст.
Z-EFG-R як дастгоҳи хурди барқӣ мебошад, ки дорои системаи сервои ҳамгирошуда мебошад, он метавонад насос + филтр + арзиши магнитии электронӣ + клапани дроссел + дастгоҳи ҳаворо иваз кунад.
| Рақами модел Z-EFG-R | Параметрҳо |
| Зарбаи умумӣ | 20 мм |
| Қувваи фишурда | 80N |
| Такрорпазирӣ | ±0.02 мм |
| Вазни тавсияшудаи часпак | 0.8 кг |
| Реҷаи интиқол | Рафи фишангдор + Роҳнамои ғалтаки салибӣ |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.45с |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80 (бе сармо) |
| Реҷаи ҳаракат | Ду ангушт ба таври уфуқӣ ҳаракат мекунанд |
| Назорати зарба | Танзимшаванда |
| Танзими қувваи фишурдан | Танзимшаванда |
| Вазн | 0.5 кг |
| Андозаҳо (дарозӣ*паҳноӣ*баландӣ) | 68*68*132.7мм |
| Ҷойгиркунии контроллер | Дарунсохт |
| Қудрат | 5W |
| Навъи муҳаррик | Бе хасу DC |
| Шиддати номиналӣ | 24В |
| Ҷараёни авҷӣ | 1A |
| Дасти роботи шашмеҳвари мутобиқшаванда | УР, Аубо |
Ронандагӣ ва контроллер дарунсохт мебошанд
Z-EFG-R як дастгоҳи хурди барқӣ мебошад, ки дорои системаи сервои ҳамгирошуда мебошад, он метавонад насоси ҳаво + филтр + клапани магнитии электронӣ + клапани дроссел + дастгоҳи ҳаворо иваз кунад.


Мутобиқ бо бозуи роботии шаш меҳварӣ
Дастгир метавонад бо бозуи роботи шашмеҳвари асосӣ мувофиқ бошад, то пайваст ва бозӣ кунад, зарбаи он 20 мм дарозӣ дорад, қувваи фишурдакунӣ 80N аст, зарба ва қувваи фишурдакунии он танзим карда мешавад.
Шакли хурд, насб кардан чандир аст
Андозаи Z-EFG-R L68*W68*H132.7mm буда, сохтори он паймон аст, усулҳои насби бисёрҷонибаро дастгирӣ мекунад, контроллер дарунсохт аст, фазои хурдро ишғол мекунад ва барои дархостҳои гуногуни вазифаҳои часпидан истифода бурдан осон аст.

Зуд вокуниш нишон додан, назорати дақиқӣ
Кӯтоҳтарин вақти ҳаракати як зарба 0.45 сония аст, такроршавандагии он ±0.02 мм аст, қисми думашро ба осонӣ иваз кардан мумкин аст ва муштариён метавонанд ашёро мувофиқи дархост маҳкам кунанд.
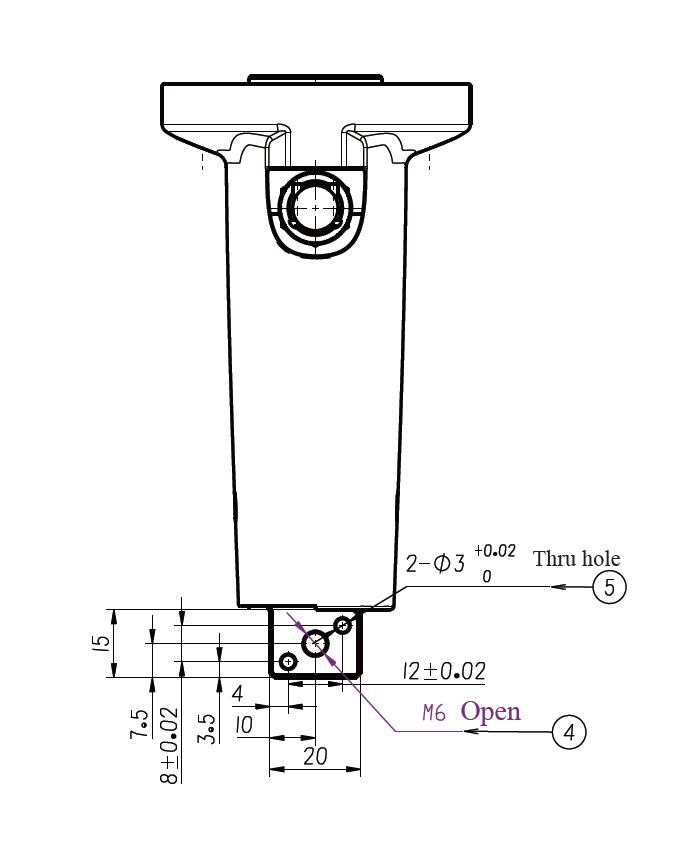
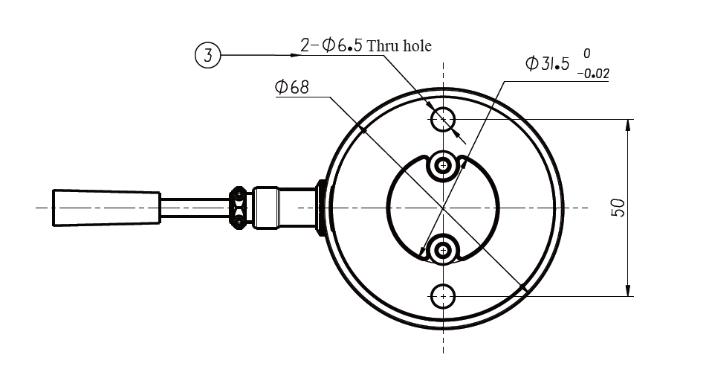
Диаграммаи насби андоза
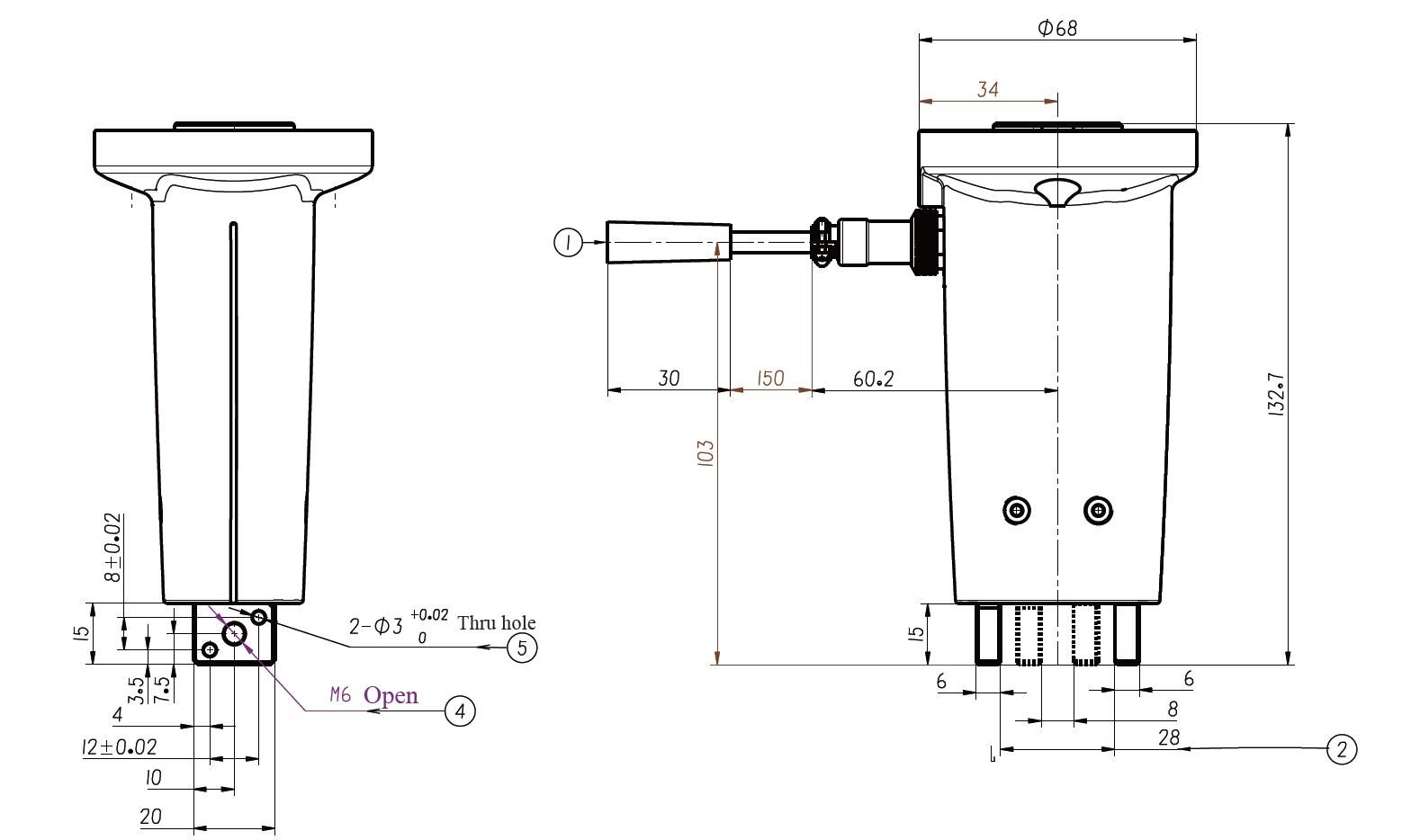
① RKMV8-354 Пайвасткунаки ҳавопаймоии панҷаслӣ ба RKMV8-354
② Зарбаи фишанги барқӣ 20 мм аст
③ Мавқеи насб, бо истифода аз ду винти M6 ба фланҷ дар охири бозуи роботи UR пайваст шавед
④ Мавқеи насб, мавқеи насби арматура (винти M6)
⑤ Мавқеи насб, мавқеи насби арматура (3 сӯрохии сӯзаншакли силиндрӣ)
Параметрҳои барқӣ
Шиддати номиналӣ 24±2V
Ҷараён 0.4A

Тиҷорати мо


Категорияҳои маҳсулот
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

СИЛСИЯИ ГРАППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-50 Paral...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-40...