Дастбанди роботи муштарак – Дастбанди дастбанди Cobot бо қулфи нарми дохилии ISC



Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматизатсия / Дастгири дасти кобот / Дастгири нарм / Дастгири дасти робот
Ариза

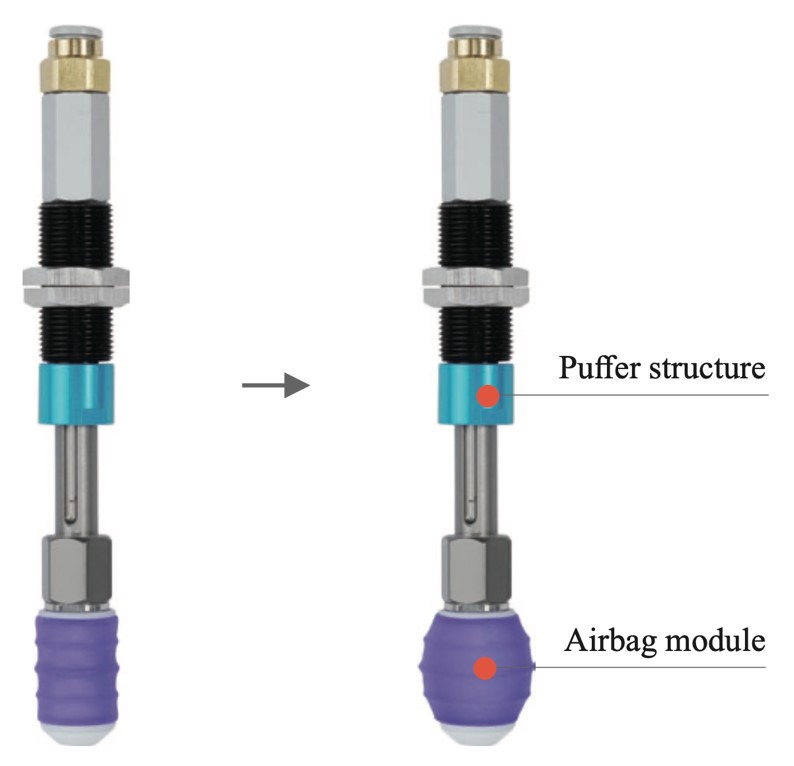
Қисмати дастгирии дохилии ISC як дастгоҳи нарми инноватсионӣ мебошад, ки тарҳи он морфологияи худмудофиаи моҳии пуфакдорро тақлид мекунад. Тавассути пур кардани ҳаво бо фишор, дастгоҳ метавонад васеъ шавад ва мустаҳкамкунии дастгирии дохилиро пурра кунад.
Аз сабаби тамос бо қисм бо резини мулоими силиконӣ, пас аз илова кардани фишор, байни сатҳи сахти такягоҳ ва сатҳи тамос қабати "болишти ҳавоӣ" пайдо мешавад, ки фишорро яксон мекунад ва эҳтимол дорад, ки ба қисмати корӣ зарар нарасонад. Илова бар ин, фишори ҳавои воридшавандаро метавон барои назорат кардани дарозшавии болишти ҳавоӣ ва тамос бо фишор бо қисм танзим кард, то нармии системаи часпак ба таври назаррас афзоиш ёбад.
Хусусият

· Воситаҳои ронандагӣ: ҳавои тоза
· Давомнокии стандартии корӣ: >100,000 маротиба
·Басомади максималии корӣ (cpm): 300
● Қисмати дастгирии дохилӣ сохтори махсуси болишти ҳавоӣ дорад ва метавонад дар баробари фишори дохилӣ деформатсияҳои гуногунро ба вуҷуд орад.
● Фишори мусбати вурудӣ: Арматура дароз мешавад, худтанзимшаванда дар сатҳи дарунии ашё дастгирӣ карда, часпиданро пурра мекунад.
● Фишори манфии вуруд: Арматура статаҳои табииро нишон медиҳад ва ашёро раҳо мекунад.
Дастпӯшакҳои нарми SFG бо дастаҳои роботии ҳамкории сатҳи ҷаҳонӣ истифода шудаанд, аз ҷумла:

4-меҳвари уфуқӣ (SCARA) робот Delta
Бозуи роботҳои саноатӣ Начи Фуджикоши
Роботи 4-меҳварии параллелӣ (Делта) ABB
Роботи муштараки 6-меҳварӣ UR
Роботи муштараки 6-меҳварӣ AUBO



Параметри мушаххасот
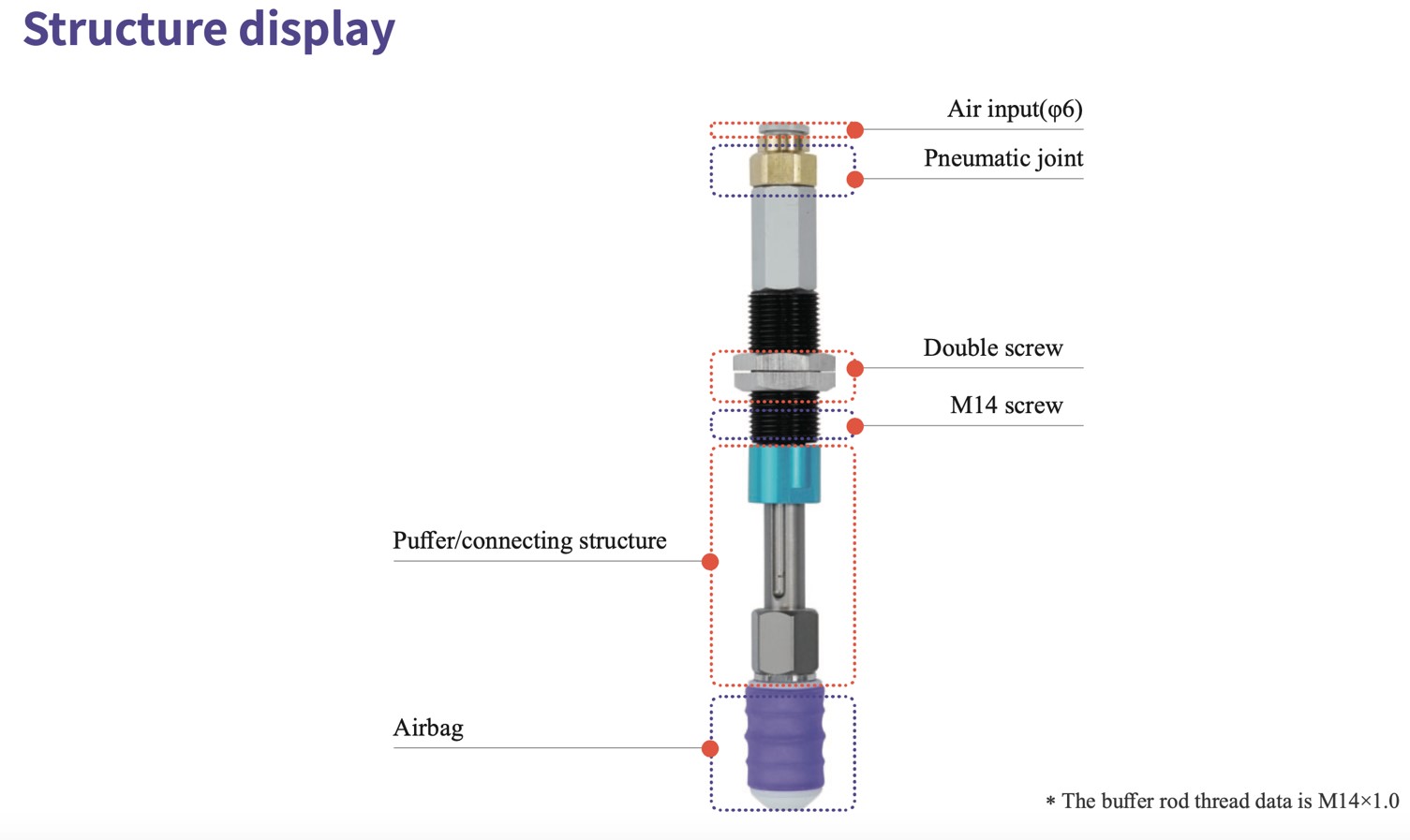
Қулфи пуштибонии дохилии болишти ҳавоии ISC як дастгоҳи нарми инноватсионӣ мебошад, ки тарҳи он морфологияи худмудофиаи моҳии пуфшавандаро тақлид мекунад. Тавассути пур кардани ҳаво бо фишор, дастгоҳ метавонад васеъ шавад ва часпидани пуштибонии дохилиро пурра кунад. Азбаски фишори ҳавои вурудӣ дақиқ назорат карда мешавад, қувваи часпидан ба дастгоҳ ба қисми корӣ низ назорат карда мешавад, ки ба қисмати корӣ зарар расонидан осон нест.
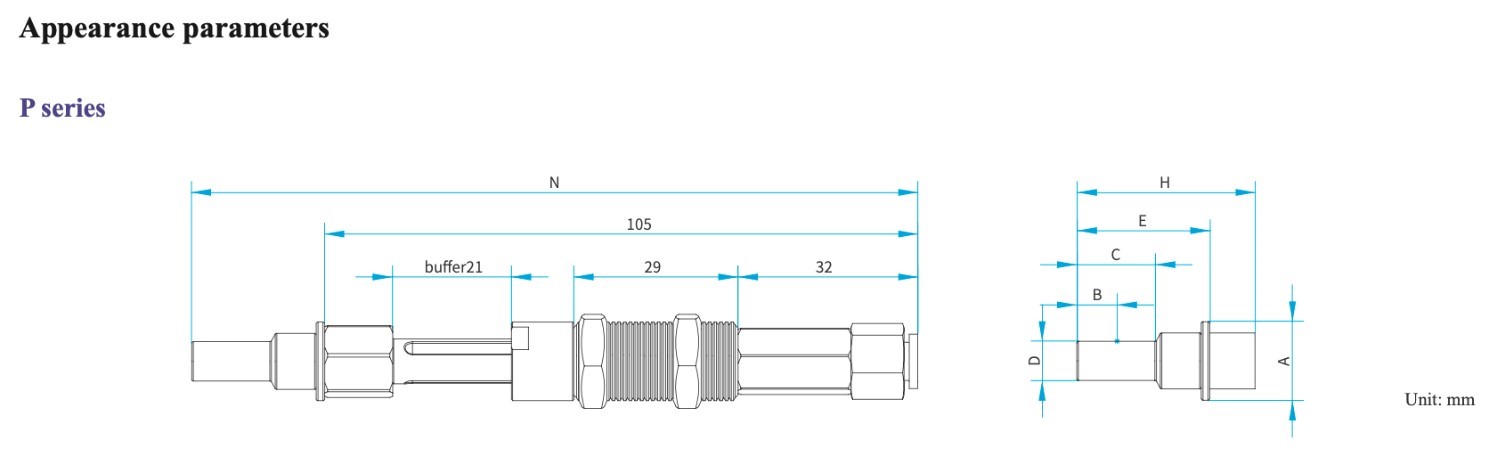
| Модел | Баландии умумии модули болишти ҳавоӣ H | Диаметри сатҳи тамос D | Диаметри қисми сохтории А | Баландӣ аз диаметри корӣ то поёни B | Баландии сатҳи муассири тамос C | Баландии кории болишти ҳавоӣ модули E | Дарозии умумӣ N |
| ISC-P4.5E | 25.5 | 4.5 | 14 | 4 | 8 | 17.5 | E+105 |
| ISC-P5E | 27.5 | 5 | 14 | 5 | 10 | 19.5 | E+105 |
| ISC-P6E | 30.5 | 6 | 14 | 6 | 12 | 22.5 | E+105 |
| ISC-P7E | 31.5 | 7 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P8E | 31.5 | 8 | 14 | 7 | 14 | 23.5 | E+105 |
| ISC-P9E | 32.5 | 9 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P10E | 32.5 | 10 | 14 | 7.5 | 15 | 24.5 | E+105 |
| ISC-P11E | 34.5 | 11 | 14 | 7.5 | 15 | 26.5 | E+105 |
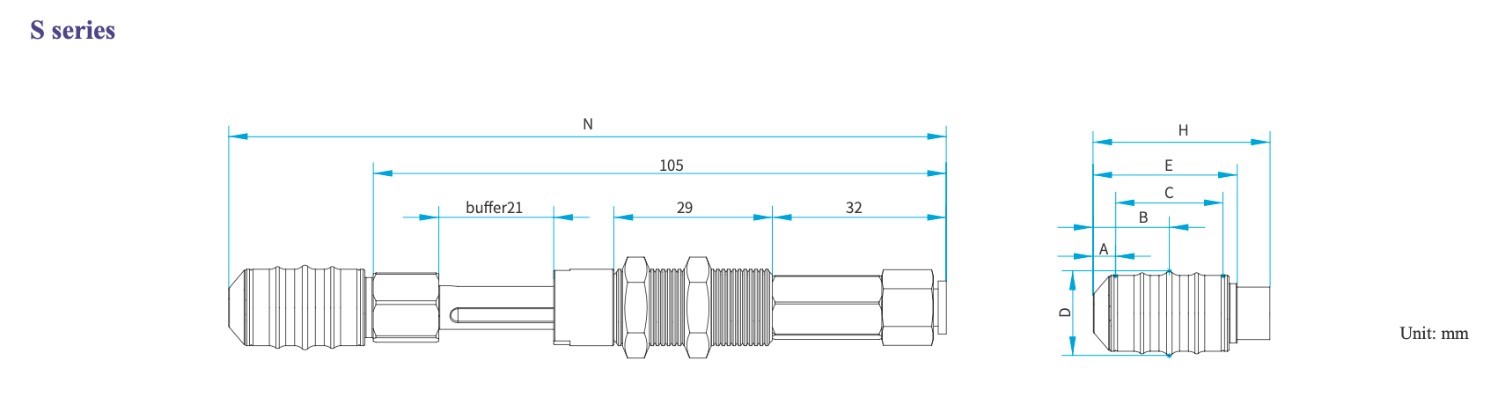
| Модел | Баландии умумии модули болишти ҳавоӣ H | Диаметри сатҳи тамос D | баландии роҳнамо A | Баландӣ аз диаметри корӣ то поёни B | Баландии сатҳи муассири тамос C | Баландии кории болишти ҳавоӣ модули E | Дарозии умумӣ N |
| ISC-S14E | 32.5 | 14 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S15.5E | 32.5 | 15.5 | 4 | 14 | 20 | 26.5 | E+105 |
| ISC-S18E | 40.5 | 18 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S20.5E | 40.5 | 20.5 | 6 | 19 | 26 | 34.5 | E+105 |
| ISC-S23E | 40.5 | 23 | 6 | 19 | 26 | 34.5 | E+105 |
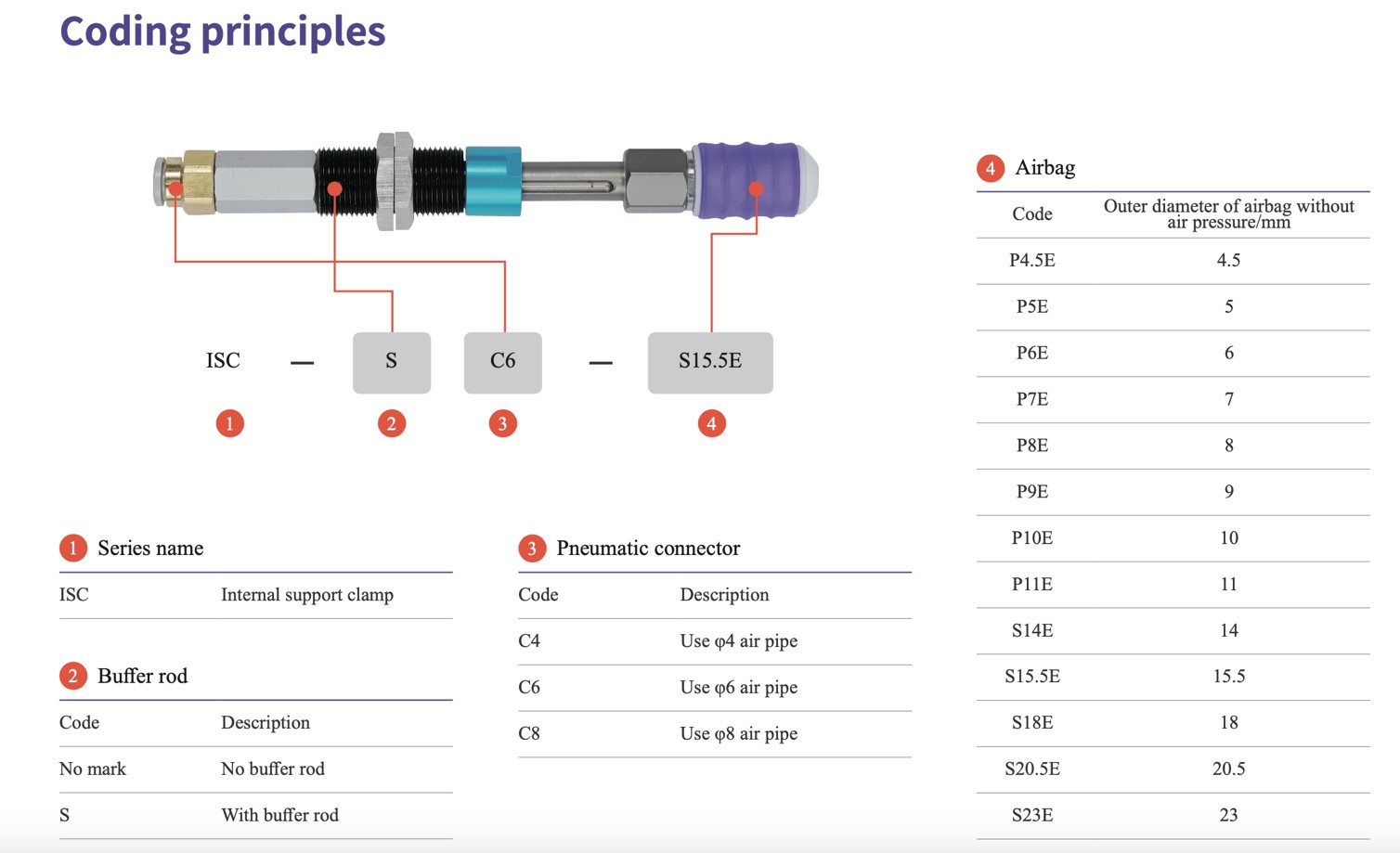
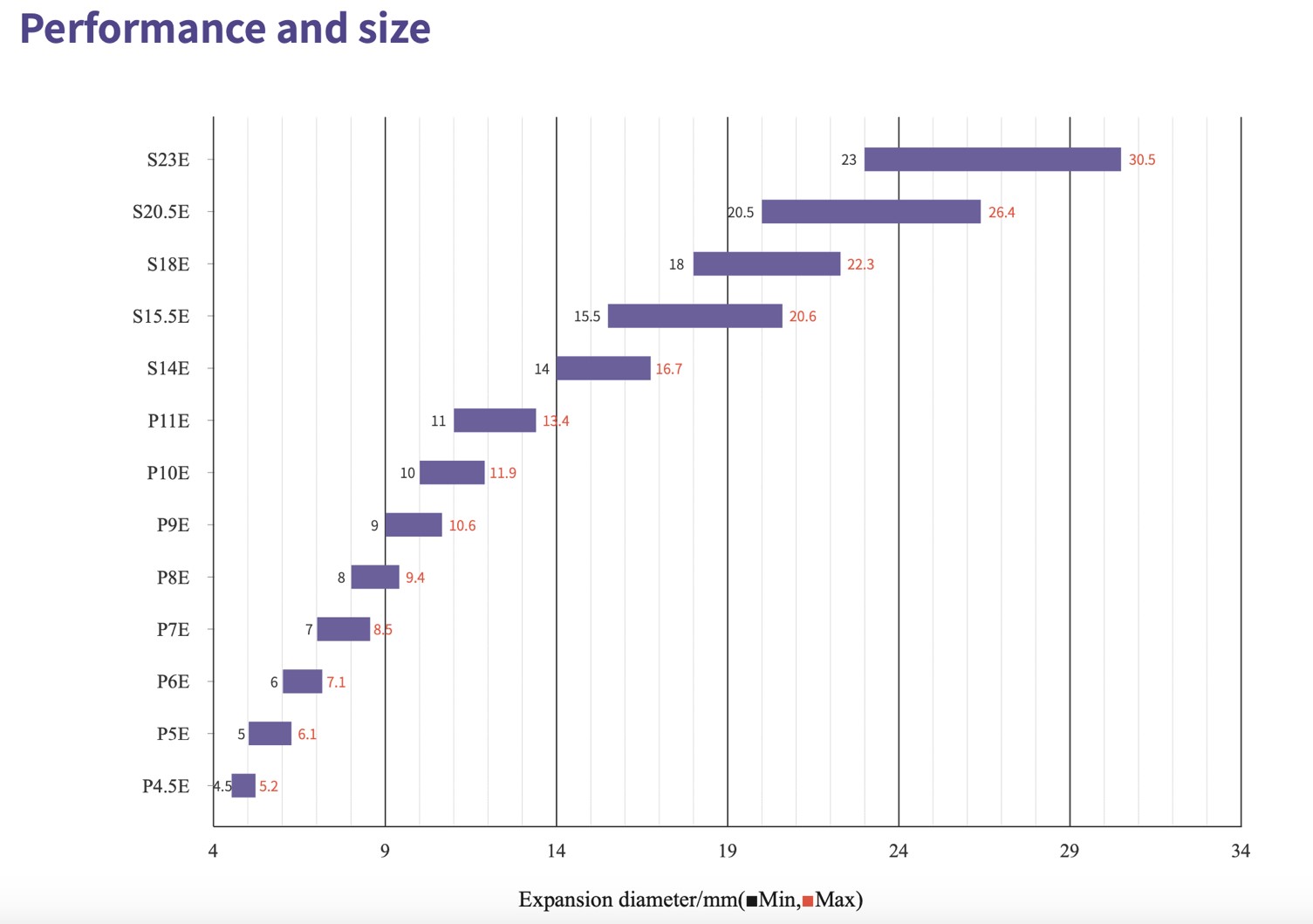
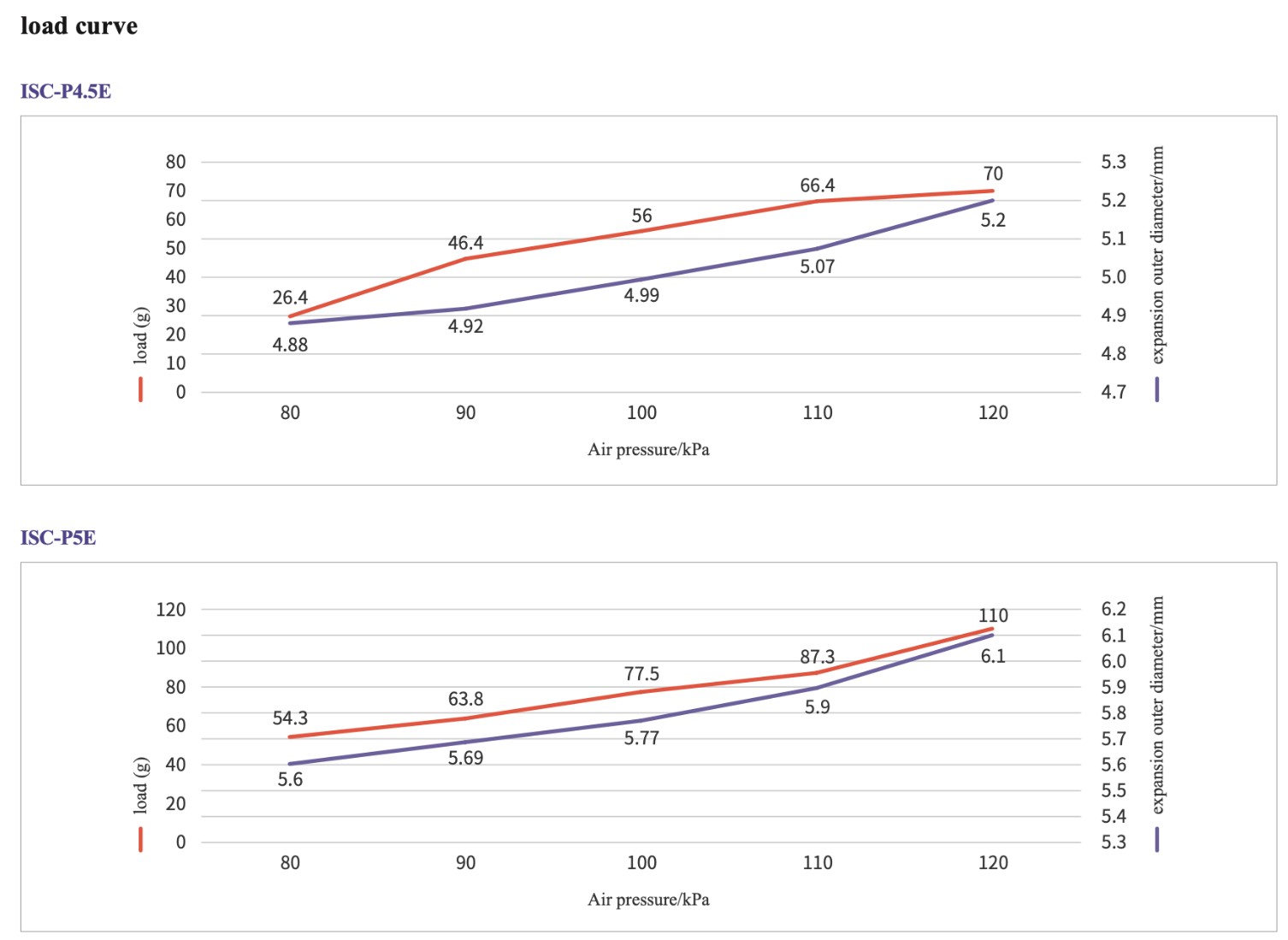
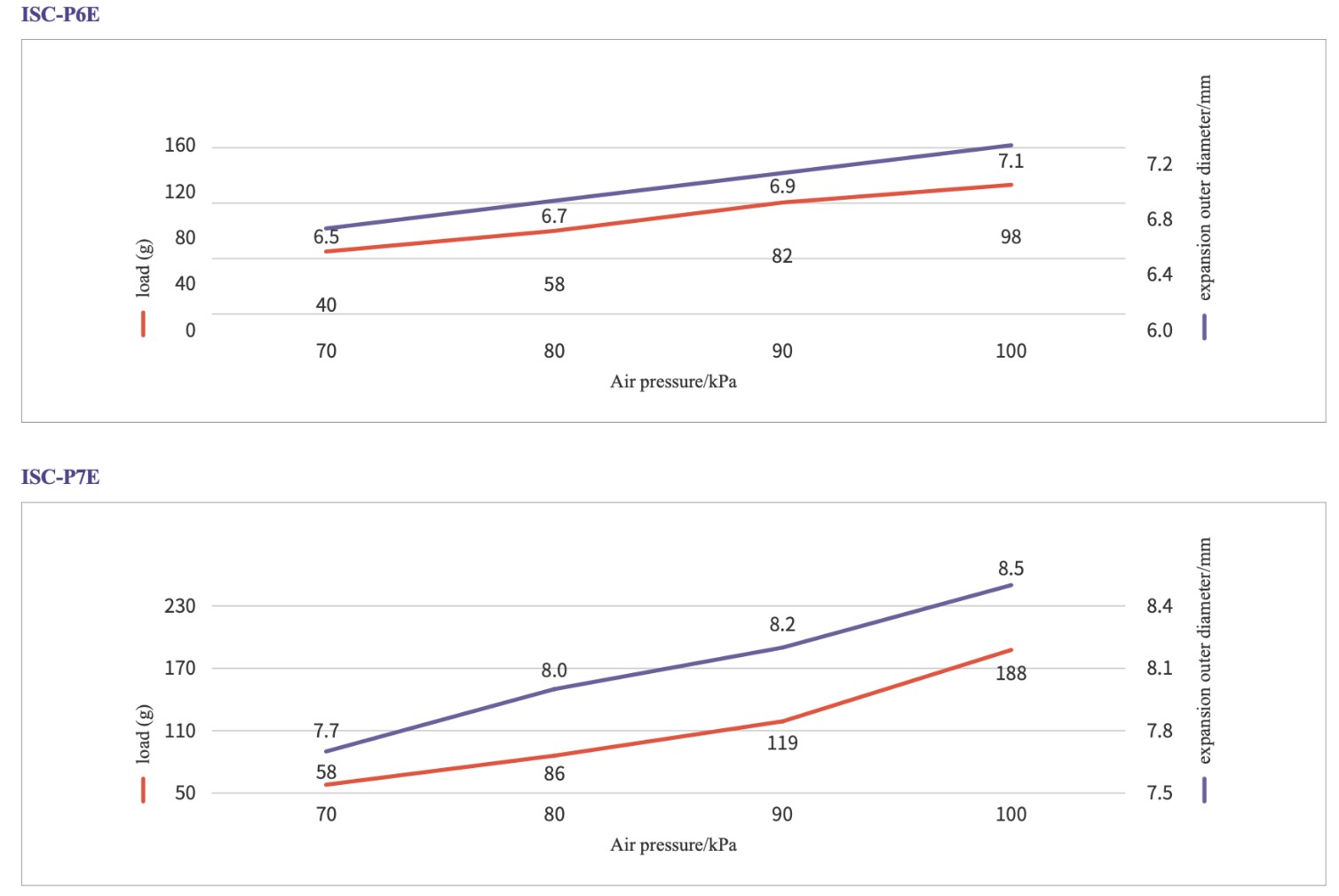
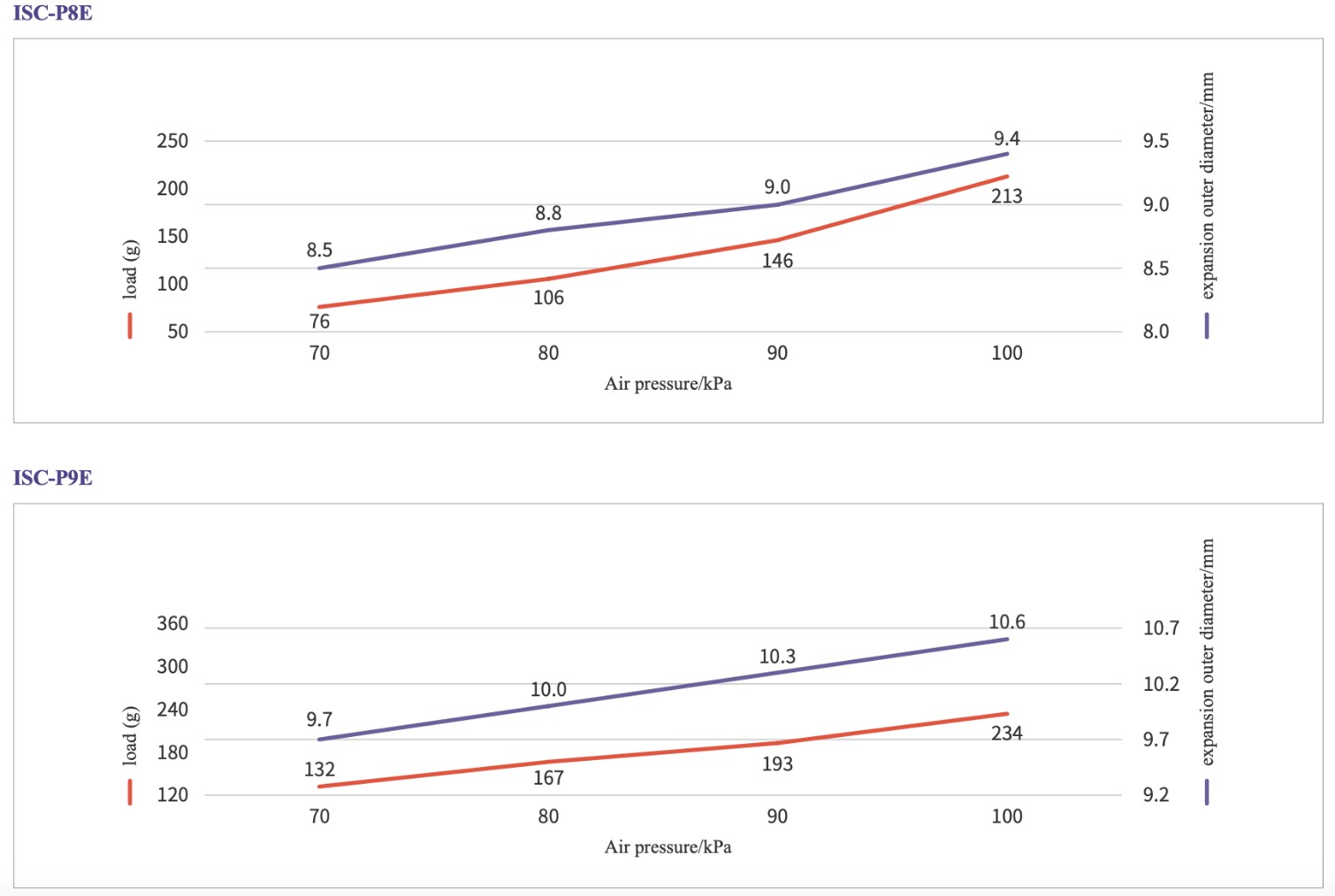
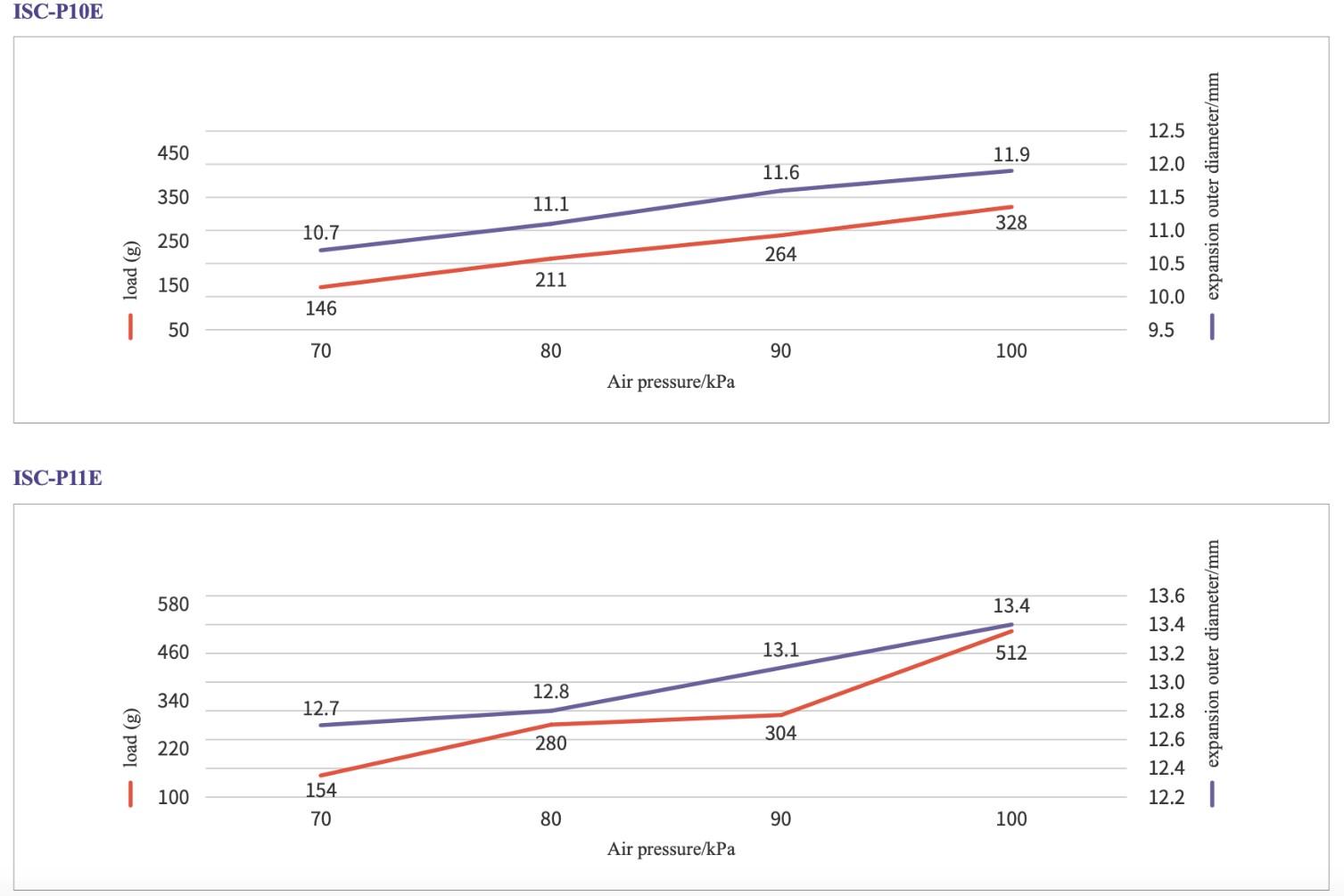
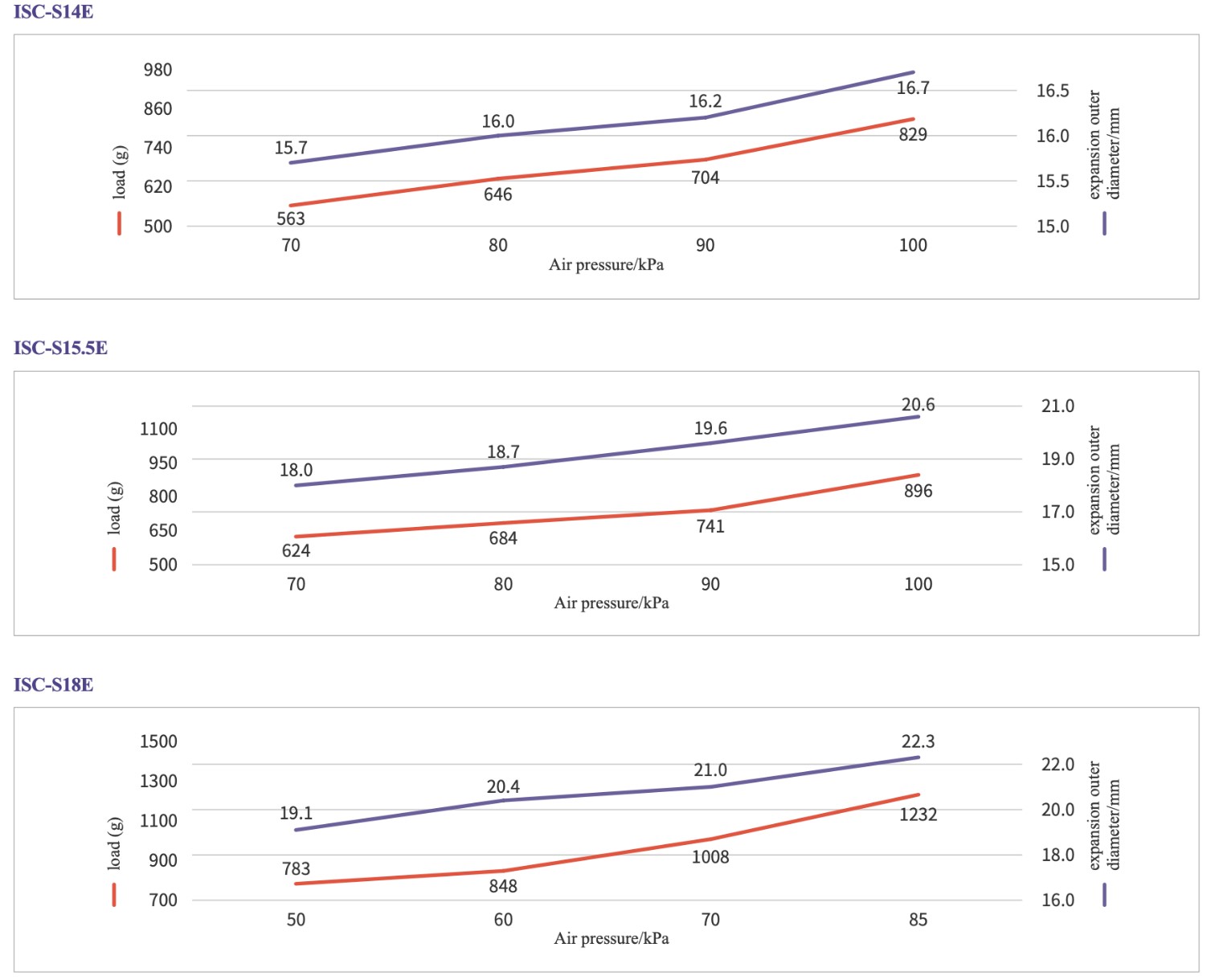
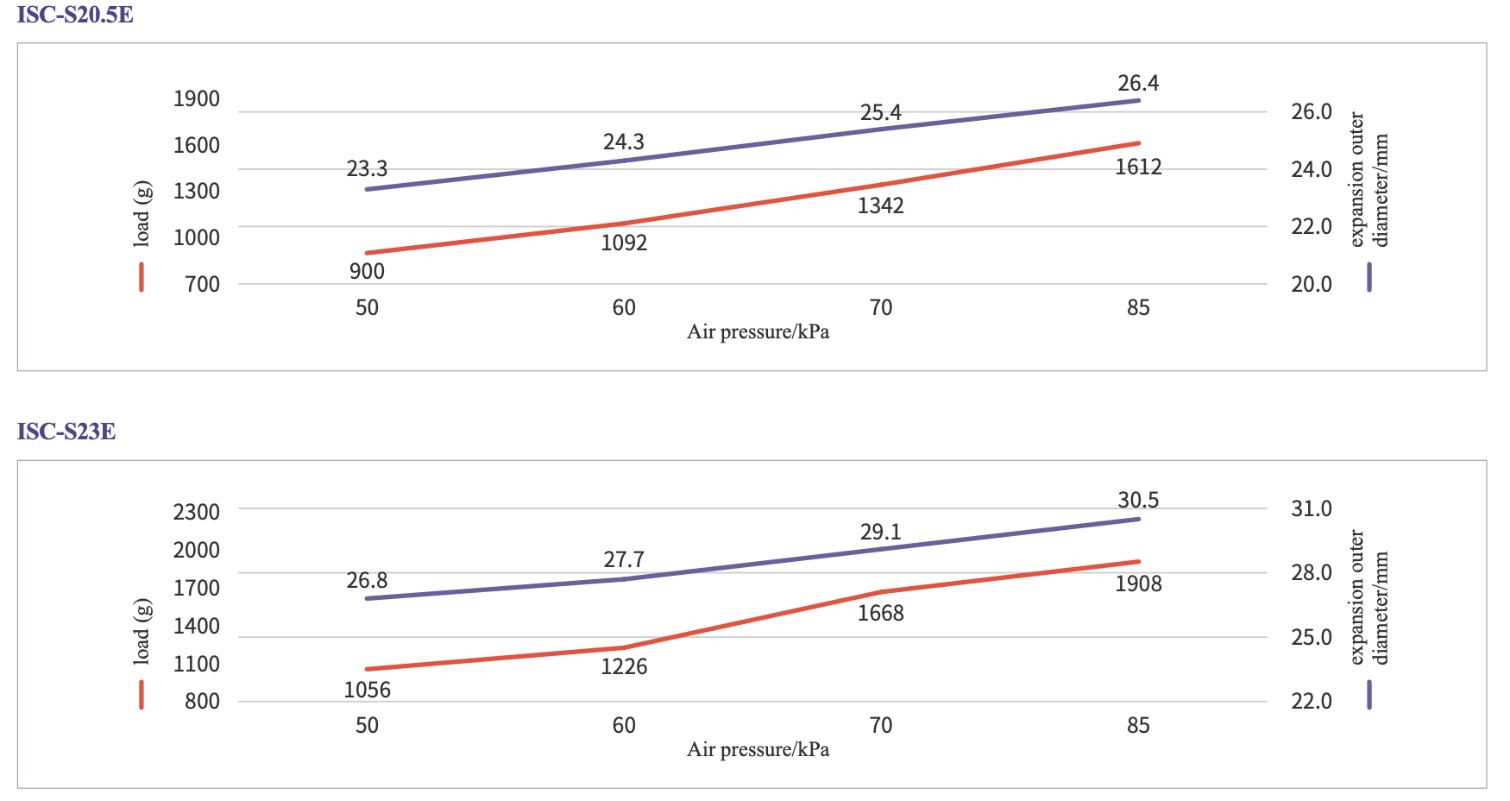
Диаметри берунии васеъшуда
| Модел | Диапазони фишори корӣ / кПа | Диаметри берунии васеъшавии максималӣ/мм | Бори ҳадди аксар/г | Вазни асбоб/г | Намунаи чӯби металлӣ | Андозаи сӯрохи васлкунӣ/мм |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S20.5E | 0-85 | 26.4 | Соли 1612 | 49 | VFNT 1421-G18 | 14.5 |
| ISC-SC6-S23E | 0-85 | 30.5 | Соли 1908 | 51 | VFNT 1421-G18 | 14.5 |
* Силсилаи P Объекти озмоиши бори ҳадди аксар диаметри берунии модел +0.3 мм аст; Силсилаи S Объекти озмоиши бори ҳадди аксар диаметри берунии модел +1 мм аст; Санҷиши бор бо асбобҳои касбӣ чен карда мешавад.
Тиҷорати мо







