Силсилаи дастаки барқии HITBOT – Дастаки барқии параллелии Z-EFG-20S


Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза
Дастгирҳои роботии силсилаи SCIC Z-EFG андозаи хурд доранд ва дорои системаи дарунсохти серво мебошанд, ки имкон медиҳад, ки суръат, мавқеъ ва қувваи фишурда дақиқ назорат карда шавад. Системаи пешрафтаи фишурдасозии SCIC барои роҳҳои ҳалли автоматикунонӣ ба шумо имкон медиҳад, ки имкониятҳои навро барои автоматикунонии вазифаҳое, ки шумо ҳеҷ гоҳ имконнопазир меҳисобидед, кушоед.

Хусусият

·Дастгоҳи барқии серво-муҳаррики хурд, вале пуриқтидор.
· Терминалҳоро барои қонеъ кардани талаботи гуногуни лоиҳа иваз кардан мумкин аст.
· Метавонад ашёи нозук ва деформатсияшавандаро, ба монанди тухм, найчаҳои озмоишӣ, ҳалқаҳо ва ғайраро бардошта гирад.
· Барои саҳнаҳое, ки манбаъҳои ҳаво надоранд (масалан, лабораторияҳо ва беморхонаҳо), мувофиқ аст.
● Пешбурди инқилоб дар иваз кардани фишангҳои пневматикӣ бо фишангҳои барқӣ, аввалин фишанги барқӣ бо системаи сервои муттаҳидшуда дар Чин.
● Ивазкунии комил барои компрессори ҳаво + филтр + клапани электромагнитӣ + клапани дросселӣ + дастаки пневматикӣ
● Мӯҳлати хидматрасонии якчанд давра, ки бо силиндраи анъанавии Ҷопон мувофиқ аст




Параметри мушаххасот
Z-EFG-20s як дастгоҳи фишанги барқӣ бо муҳаррики серво мебошад. Z-EFG-20S дорои муҳаррик ва контроллери ҳамгирошуда мебошад, ки андозаи хурд доранд, вале пуриқтидоранд. Он метавонад фишангҳои ҳавоии анъанавиро иваз кунад ва фазои кориро хеле сарфа кунад.
●Дастгоҳи барқии серво-муҳаррики хурд, вале пуриқтидор.
●Терминалҳоро метавон барои қонеъ кардани талаботи гуногуни лоиҳа иваз кард.
●Метавонад ашёи нозук ва деформатсиониро, ба монанди тухм, найчаҳои озмоишӣ, ҳалқаҳо ва ғайра, барад.
●Барои манзараҳои бе манбаъҳои ҳаво (ба монанди лабораторияҳо ва беморхонаҳо) мувофиқ аст.
| Рақами модел Z-EFG-20S | Параметрҳо |
| Зарбаи умумӣ | 20 мм |
| Қувваи фишурда | 8-20N (Танзимшаванда) |
| Реҷаи ҳаракат | Ду ангушт ба таври уфуқӣ ҳаракат мекунанд |
| Вазни тавсияшудаи часпак | 0.3 кг |
| Реҷаи интиқол | Рафи фишангдор + Роҳнамои ғалтаки салибӣ |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.15 сония |
| Вазн | 0.35 кг |
| Андозаҳо | 43*24*93.9мм |
| Шиддати корӣ | 24В±10% |
| Ҷараёни номиналӣ | 0.2A |
| Ҷараёни максималӣ | 0.6A |
| Синфи муҳофизатӣ | IP20 |
| Навъи муҳаррик | Мотори серво |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80 (Бе сармо) |
| Зарбаи танзимшаванда | Танзимнашаванда |
| Ҷойгиркунии контроллер | Дарунсохт |
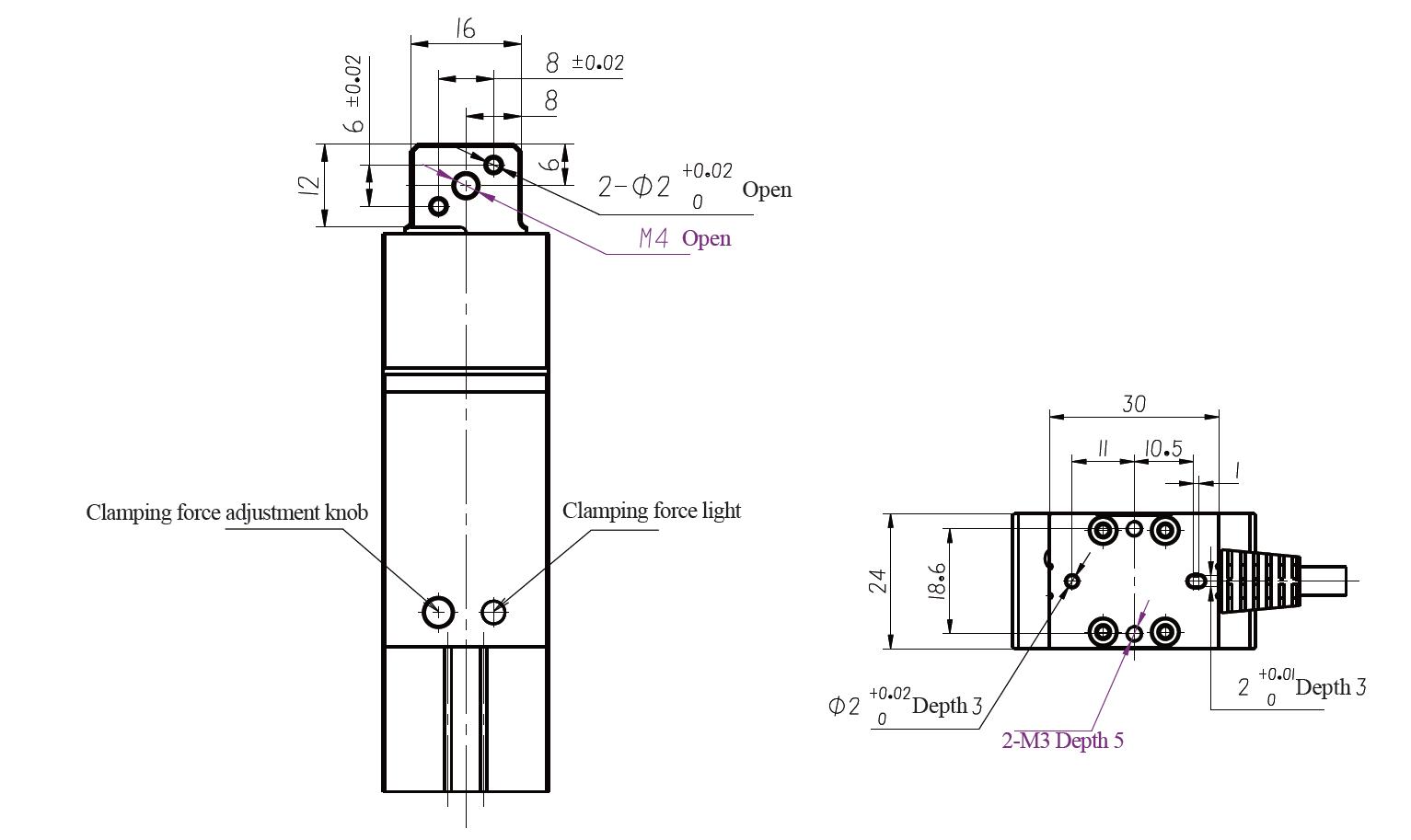
Диаграммаи насби андоза

Саволҳои зиёд такрормешуда
1. Талабот барои консентратсияи гардиш вуҷуд дорад, пас вақте ки ду тарафи дастак ба ҳам наздиканд, оё он ҳар дафъа дар мавқеи миёна меистад?
Ҷавоб: Бале, хатогии симметрӣ <0.1 мм аст ва такроршавандагӣ ±0.02 мм аст.
2. Оё дастак қисми асбобро дар бар мегирад?
Ҷавоб: Не. Истифодабарандагон бояд қисми васлкунии худро мувофиқи ашёи воқеии часпонидашуда тарҳрезӣ кунанд. Илова бар ин, Hitbot якчанд китобхонаҳои васлкуниро пешниҳод мекунад, лутфан барои гирифтани маълумоти бештар бо кормандони мо тамос гиред.
3. Контроллери диск дар куҷост ва оё ман бояд барои он пули иловагӣ пардохт кунам?
Ҷавоб: Он дарунсохт аст, пардохти иловагӣ нест, миқдори дастгоҳ аллакай арзиши контроллерро дар бар мегирад.
4. Оё ҳаракати як ангушт имконпазир аст?
Ҷавоб: Не, фишангҳои ҳаракатдиҳандаи як ангушт ҳанӯз дар ҳоли таҳия мебошанд, лутфан барои гирифтани маълумоти бештар бо кормандони мо тамос гиред.
5. Суръати кори Z-EFG-20S чанд аст?
Ҷавоб: Z-EFG-20S барои як ҳаракати пурра дар як самт 0,15 сония ва барои як ҳаракати рафтуомад 0,3 сония вақт мегирад.
6. Қувваи фишурдани Z-EFG-20S чист ва онро чӣ гуна танзим кардан мумкин аст?
Ҷавоб: 8-20N, бо тугма танзимшаванда.
7. Чӣ тавр зарбаи Z-EFG-20S-ро танзим кардан мумкин аст?
Ҷавоб: Z-EFG-20S танзими зарбаро дастгирӣ намекунад.
8. Оё дастгоҳи барқӣ обногузар аст?
Ҷавоб: Синфи ҳифзи IP 20.
9. Дар Z-EFG-20S кадом намуди муҳаррик истифода мешавад?
Ҷавоб: Мотори серво.
10. Оё истифодаи ҷоғҳои Z-EFG-8S ё Z-EFG-20S барои нигоҳ доштани ашёи аз 20 мм калонтар имконпазир аст?
Ҷавоб: Бале, 8мм ва 20мм ба зарбаи муассир ишора мекунанд, на ба андозаи ашёе, ки бояд часпонида шавад.
Z-EFG-8S метавонад барои фишурдани ашёе, ки фарқияти андозаи аз ҳадди аксар то ҳадди ақал дар дохили 8 мм доранд, истифода шавад. Z-EFG-20S метавонад барои фишурдани ашёе, ки фарқияти андозаи аз ҳадди аксар то ҳадди ақал доранд, истифода шавад.
дар доираи 20 мм.
11. Агар он кор карданро давом диҳад, оё муҳаррики дастгоҳи барқӣ аз ҳад зиёд гарм мешавад?
Ҷавоб: Пас аз санҷиши касбӣ, ҳарорати сатҳи Z-EFG-20S ҳангоми фишурдани пайваста дар ҳарорати тақрибан 30 дараҷа аз 60 дараҷа зиёд нахоҳад буд.
Тиҷорати мо


Категорияҳои маҳсулот
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-60...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-20F Para...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Ҳамкории Z-EFG-L...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER CG силсилаи – ...