Силсилаи дастакҳои барқии HITBOT – Дастаки барқии параллелии Z-EFG-20F



Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза
Дастгирҳои роботии силсилаи SCIC Z-EFG андозаи хурд доранд ва дорои системаи дарунсохти серво мебошанд, ки имкон медиҳад, ки суръат, мавқеъ ва қувваи фишурда дақиқ назорат карда шавад. Системаи пешрафтаи фишурдасозии SCIC барои роҳҳои ҳалли автоматикунонӣ ба шумо имкон медиҳад, ки имкониятҳои навро барои автоматикунонии вазифаҳое, ки шумо ҳеҷ гоҳ имконнопазир меҳисобидед, кушоед.

Хусусият
● Идоракунии қувваи дақиқӣ, ашёҳои нозукро зуд фишурда нигоҳ медорад
● Назорати дақиқи қувва барои зуд ба маҳкамкунӣ
● Зуд ҳаракат кардан ва фишурдани нозук
● Шакли хурд, қулай барои ҳамгироӣ
● Ронандагии ҳамгирошуда ва контроллери нарм
● Режимҳои бисёрҷониба, ки ба осонӣ истифода мешаванд
Қувва, бит ва суръатро Modbus идора карда метавонад
Кушодан/Бастани зуд
Вақти ҳаракати як зарба 0.1 сония аст
Андозаи хурд
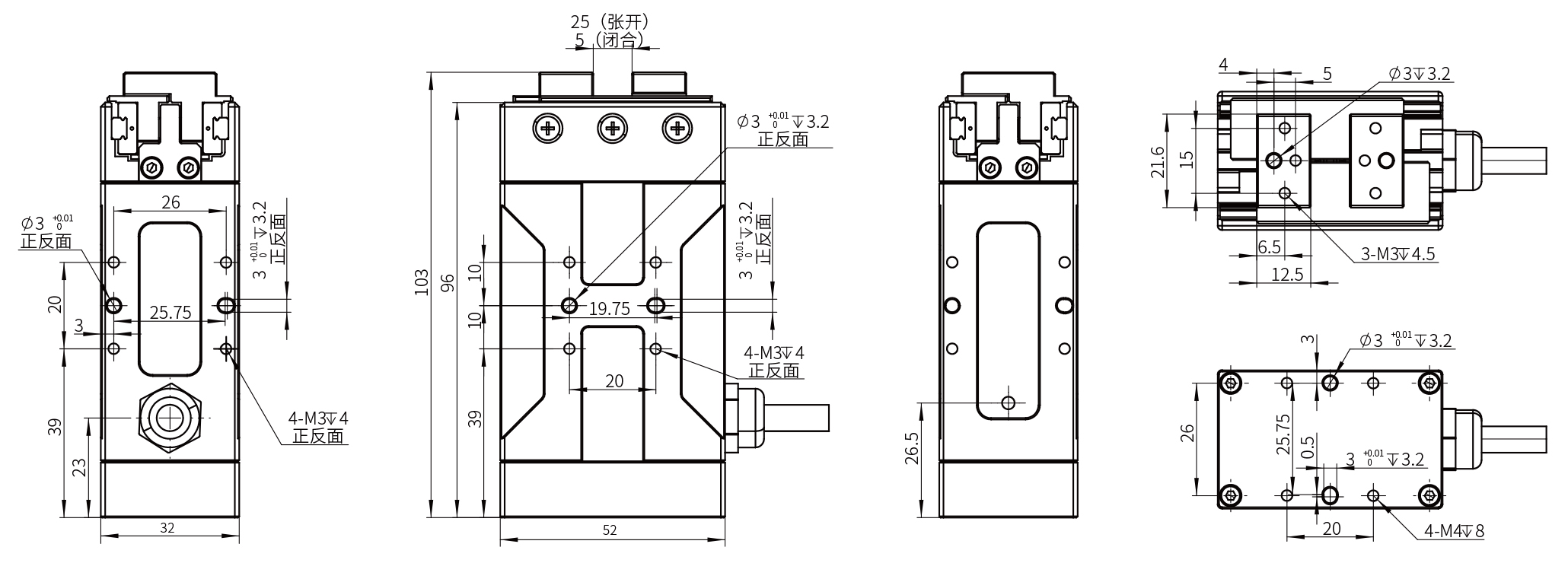
Андозаи он 52 * 32 * 103 мм аст.
Назорати қувва бо дақиқии баланд
±0.3N назорати қувва бо дақиқии баланд, қувва 1-8N аст.
Контроллер дарунсохт аст
Ҳуҷраи хурд, ҷойгиркунӣ қулай аст
Реҷаи идоракунӣ
Барои дастгирии 485 (Modbus RTU) ва идоракунии вуруд/хуруҷ
Часпондани нарм
Он метавонад ашёҳои нозукро фишурда тавонад

● Пешбурди инқилоб дар иваз кардани фишангҳои пневматикӣ бо фишангҳои барқӣ, аввалин фишанги барқӣ бо системаи сервои муттаҳидшуда дар Чин.
● Ивазкунии комил барои компрессори ҳаво + филтр + клапани электромагнитӣ + клапани дросселӣ + дастаки пневматикӣ
● Мӯҳлати хидматрасонии якчанд давра, ки бо силиндраи анъанавии Ҷопон мувофиқ аст




Параметри мушаххасот
| Рақами модел Z-EFG-20F | Параметрҳо |
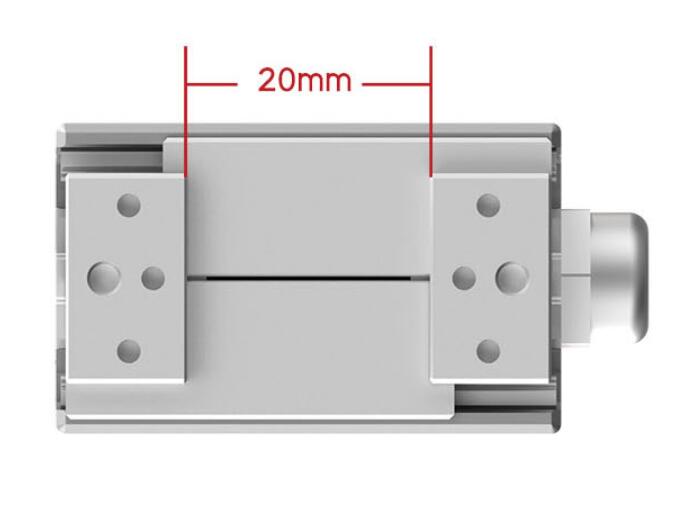
| Зарбаи умумӣ | 20 мм танзимшаванда |
| Қувваи фишурда | 1-8N танзимшаванда |
| Такрорпазирӣ | ±0.02 мм |
| Вазни тавсияшудаи часпак | ≤0.1кг |
| Реҷаи интиқол | Рафи фишанг + Роҳнамои хаттӣ |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.1с |
| Реҷаи ҳаракат | Ду ангушт ба таври уфуқӣ ҳаракат мекунанд |
| Вазн | 0.5 кг |
| Андозаҳо (дарозӣ*паҳноӣ*баландӣ) | 52*32*103мм |
| Шиддати корӣ | 24В±10% |
| Ҷараёни номиналӣ | 0.4A |
| Ҷараёни авҷӣ | 1A |
| Қудрат | 10 Вт |
| Синфи муҳофизатӣ | IP20 |
| Навъи муҳаррик | Бе хасу DC |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80 (Бе сармо) |
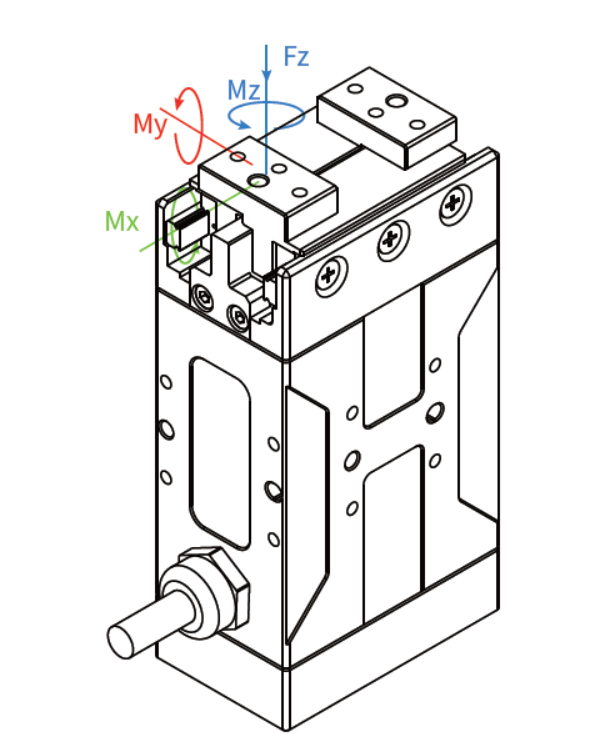
| Бори статикии иҷозатдодашуда дар самти амудӣ | |
| Фз: | 120N |
| Моменти гардиши иҷозатдодашуда | |
| Мкс: | 0.6 Нм |
| Ман: | 1 Нм |
| Мз: | 1 Нм |
Идоракунии дақиқи қувва, зуд ба фишурдан
Дастаки барқии Z-EFG-20F бояд тарҳи махсуси интиқол ва ҷуброни алгоритми ронандагиро қабул кунад, зарбаи умумии он ба 20 мм расидааст ва қувваи фишурдакунӣ 1-8N аст.

Зуд ҳаракат кардан ва фишурдани нозук
Ғафсии ин дастгоҳи барқӣ ҳамагӣ 32 мм аст, масофаи яктарафаи зарбаи ақиб ҳамагӣ 0.1 сония аст, он метавонад барои истеҳсол дар фазои хурд, зуд ва устувор часпонида шавад.
Тасвири хурд, қулай барои ҳамгироӣ

Андозаи Z-EFG-20F L52*W32*H103mm буда, сохтори он паймон аст, ки усулҳои насби чандири чандирро дастгирӣ мекунад, контроллери он дарунсохт буда, фазои хурдро ишғол мекунад, ки иҷрои вазифаҳои гуногуни фишурдасозиро осон мекунад.

Қисмбандии нарми ронандагӣ ва контроллери муттаҳидшуда
Қувваи фишурдакунӣ, бит ва суръати он идорашаванда аст, фишурдакунии думро ба осонӣ иваз кардан мумкин аст, муштарӣ метавонад ашёи дархосткардаи худро фишурда кунад, фишурдакунии думро тарҳрезӣ кунад ва фишурдакунандаи барқиро барои иҷрои вазифаи фишурдакунӣ то ҳадди имкон таъмин кунад.
Режимҳои бисёрҷониба, ба осонӣ истифода мешаванд
Конфигуратсияи дастгоҳи барқии Z-EFG-20F оддӣ аст, он дорои режимҳои фаровони идоракунӣ мебошад, ки 485 (Modbus RTU) ва вуруд/хуруҷи автобусро дастгирӣ мекунад, танҳо як сим лозим аст, онро метавон ислоҳ кард ва аз ҷониби нармафзор истифода бурд.

Ҷойивазкунии Маркази Вазни Бор
Тиҷорати мо


Категорияҳои маҳсулот
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIES PGC –...
-

Дастгири роботи муштарак – ISC Inner S...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-C6...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...