СИЛСИЛАИ ГИППЕРҲОИ ЭЛЕКТРИКИИ HITBOT – ГИППЕРИ ЭЛЕКТРИКИИ РОТОРИИ Z-ERG-20




Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
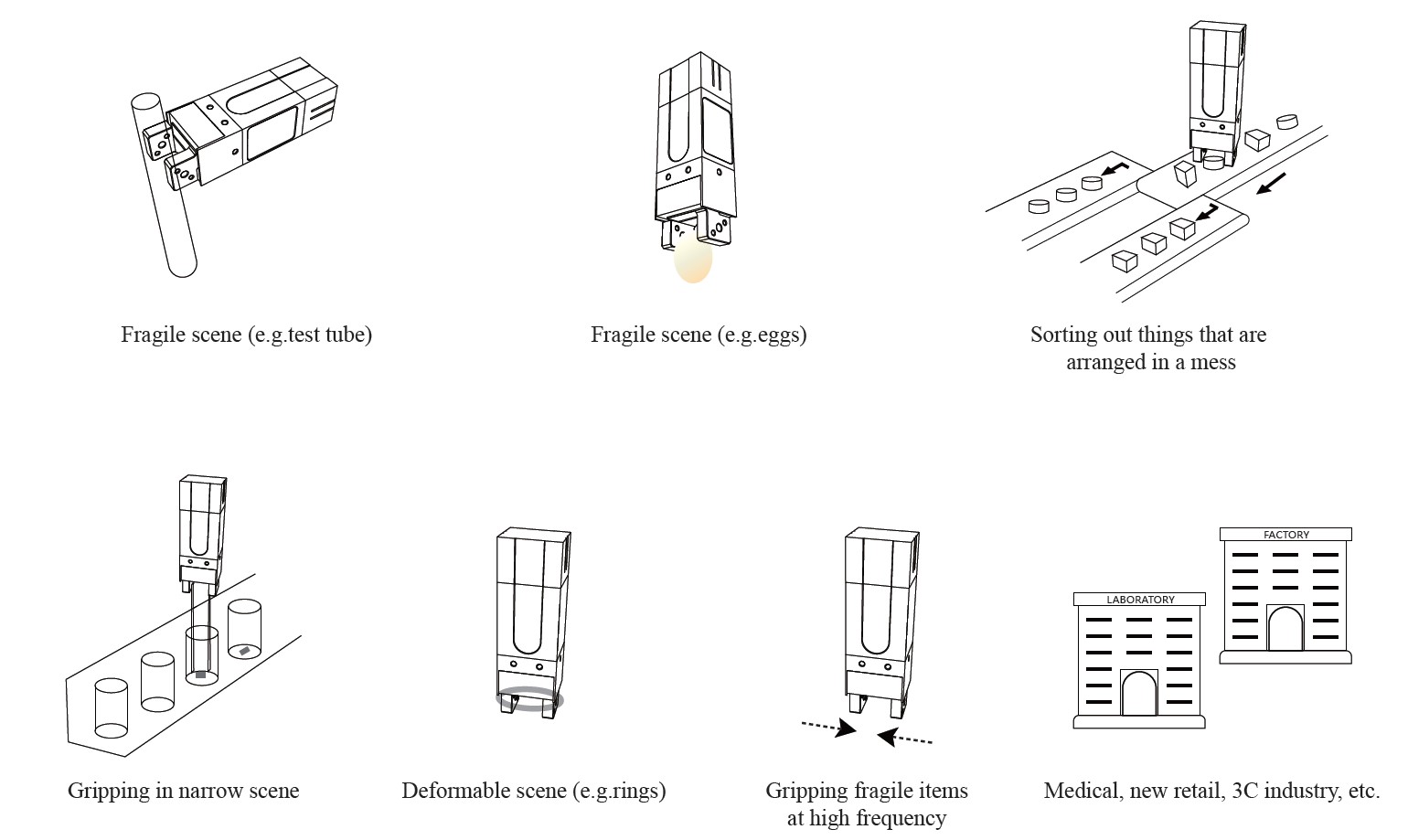
Ариза
Дастгирҳои роботии силсилаи SCIC Z андозаи хурд доранд ва дорои системаи дарунсохти серво мебошанд, ки имкон медиҳад, ки суръат, мавқеъ ва қувваи фишурда дақиқ назорат карда шавад. Системаи пешрафтаи фишурдасозии SCIC барои роҳҳои ҳалли автоматикунонӣ ба шумо имкон медиҳад, ки имкониятҳои навро барои автоматикунонии вазифаҳое, ки шумо ҳеҷ гоҳ имконнопазир меҳисобидед, кушоед.
Хусусият

·Дастгирии гардиши беохир ва гардиши нисбӣ, набудани ҳалқаи лағжиш, арзиши пасти нигоҳдорӣ
· Қувваи гардиш ва фишурдан, мавқеъ ва суръатро дақиқ идора кардан мумкин аст
·Мӯҳлати хизмати дароз, давраҳои сершумор, иҷрои беҳтар аз грифпери пренуматикӣ
· Контроллери дарунсохт: фазои хурдро ишғол мекунад ва ба осонӣ истифода мешавад
·Режими идоракунӣ: дастгирии идоракунии автобуси Modbus ва вуруд/хуруҷ



Параметри мушаххасот
Манипулятори Z-ERG-20 бо одамон кор кардан осон аст ва чанголи нармро дастгирӣ мекунад. Чанголи барқӣ дорои сатҳи баланди ҳамгироӣ буда, бартариҳои зиёд дорад:
●Дастгирии гардиши беохир ва гардиши нисбӣ, набудани ҳалқаи лағжиш, арзиши пасти нигоҳдорӣ.
●Гардиш, қувваи фишурдан, пармакунӣ ва суръатро дақиқ идора кардан мумкин аст.
●Мӯҳлати дароз: даҳҳо миллион доира, аз компрессорҳои ҳавоӣ беҳтар аст.
●Контроллери дарунсохт, барои сарфаи фазо, ҳамгироӣ осон аст.
●Реҷаи идоракунӣ: дастгирии Modbus ва идоракунии вуруд/хуруҷ.
| Рақами модел Z-ERG-20 | Параметрҳо |
| Зарбаи умумӣ | 20 мм танзимшаванда |
| Қувваи фишурда | 10-35N танзимшаванда |
| Такрорпазирӣ | ±0.2 мм |
| Вазни тавсияшудаи часпак | ≤0.4кг |
| Реҷаи интиқол | Рафи фишанг + Роҳнамои хаттӣ |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.20с |
| Моменти максималии гардиш | 0.3 Нм |
| Суръати максималии гардиш | 240 чархзанӣ дар як дақиқа |
| Диапазони гардиш | Гардиши беохир |
| Рефлекси гардишкунанда | ±1° |
| Вазн | 1.0 кг |
| Андозаҳо | 54*54*141мм |
| Шиддати корӣ | 24В±10% |
| Ҷараёни номиналӣ | 1.5A |
| Ҷараёни максималӣ | 3A |
| Қудрат | 50 Вт |
| Синфи муҳофизатӣ | IP20 |
| Навъи муҳаррик | Мотори серво |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80 (Бе сармо) |
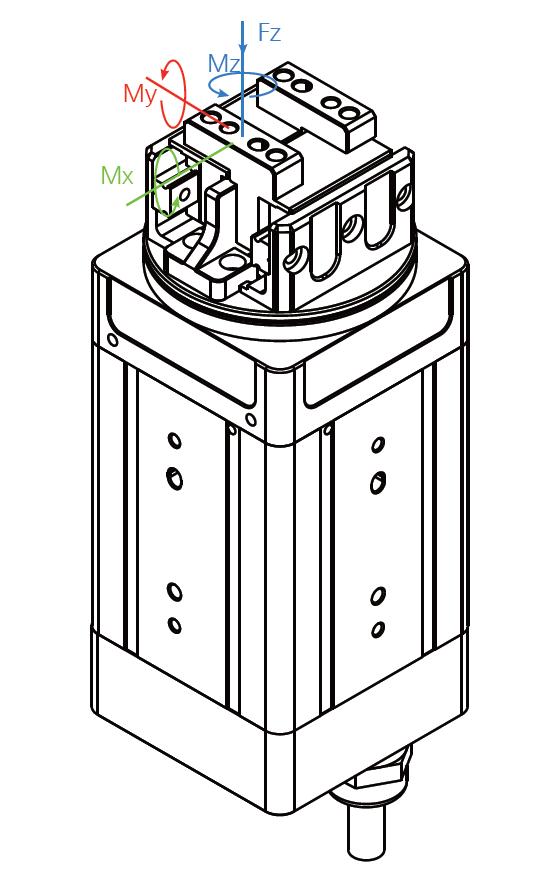
| Бори статикии иҷозатдодашуда дар самти амудӣ | |
| Фз: | 100N |
| Моменти гардиши иҷозатдодашуда | |
| Мкс: | 1.35 Нм |
| Ман: | 0.8 Нм |
| Мз: | 0.8 Нм |
Ҷойивазкунии Маркази Вазни Бор
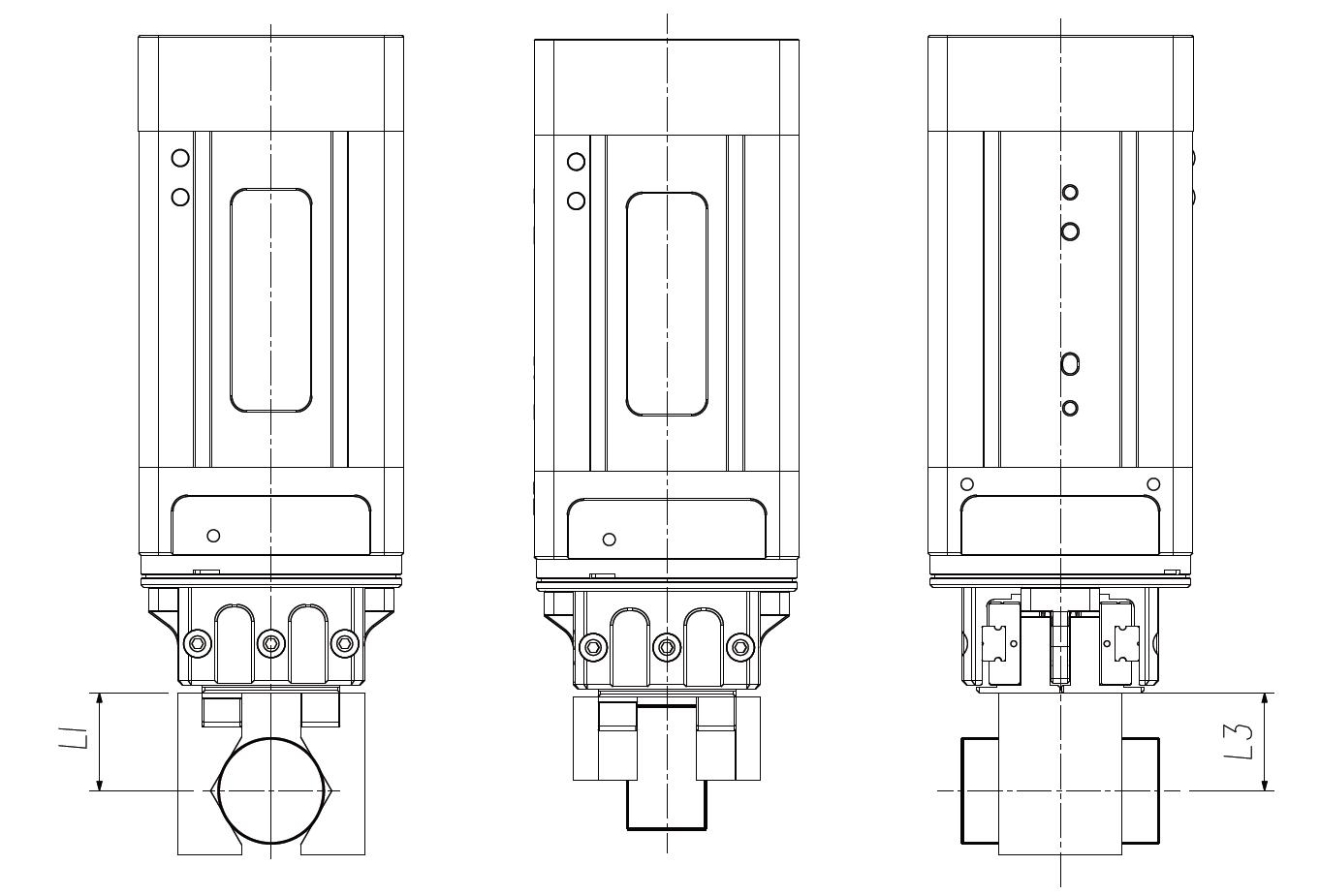
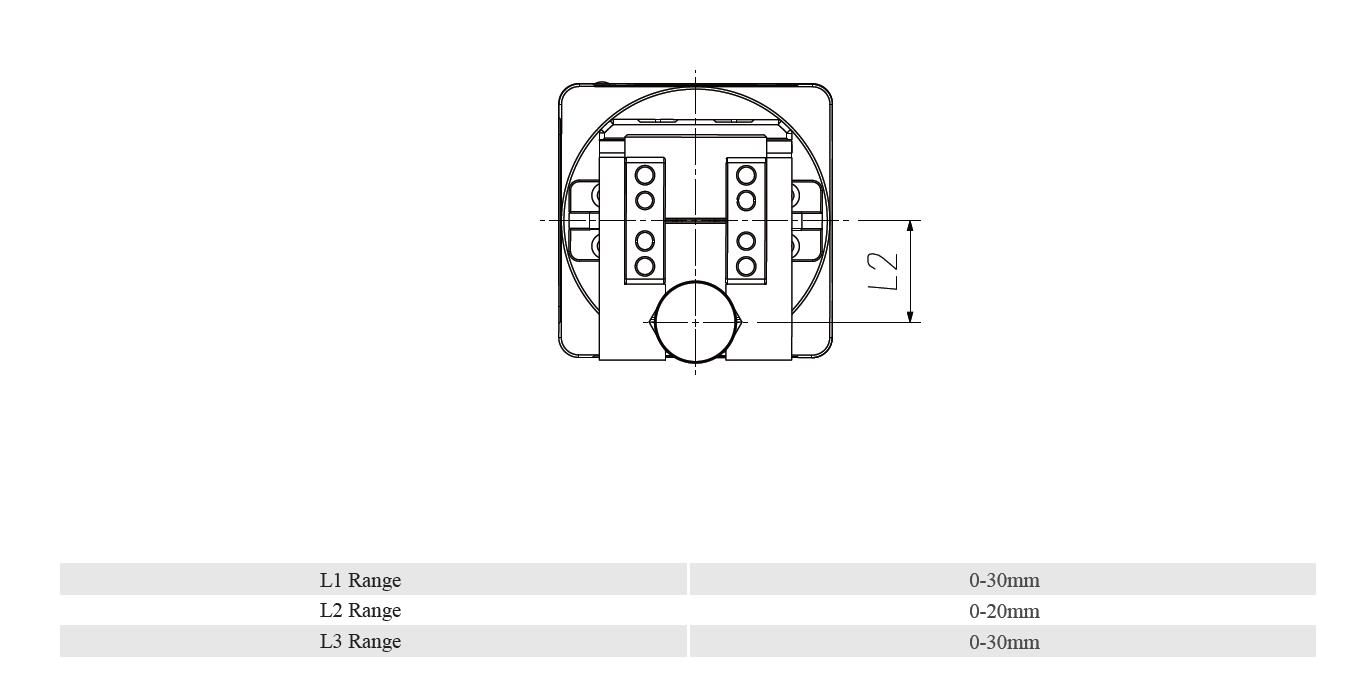
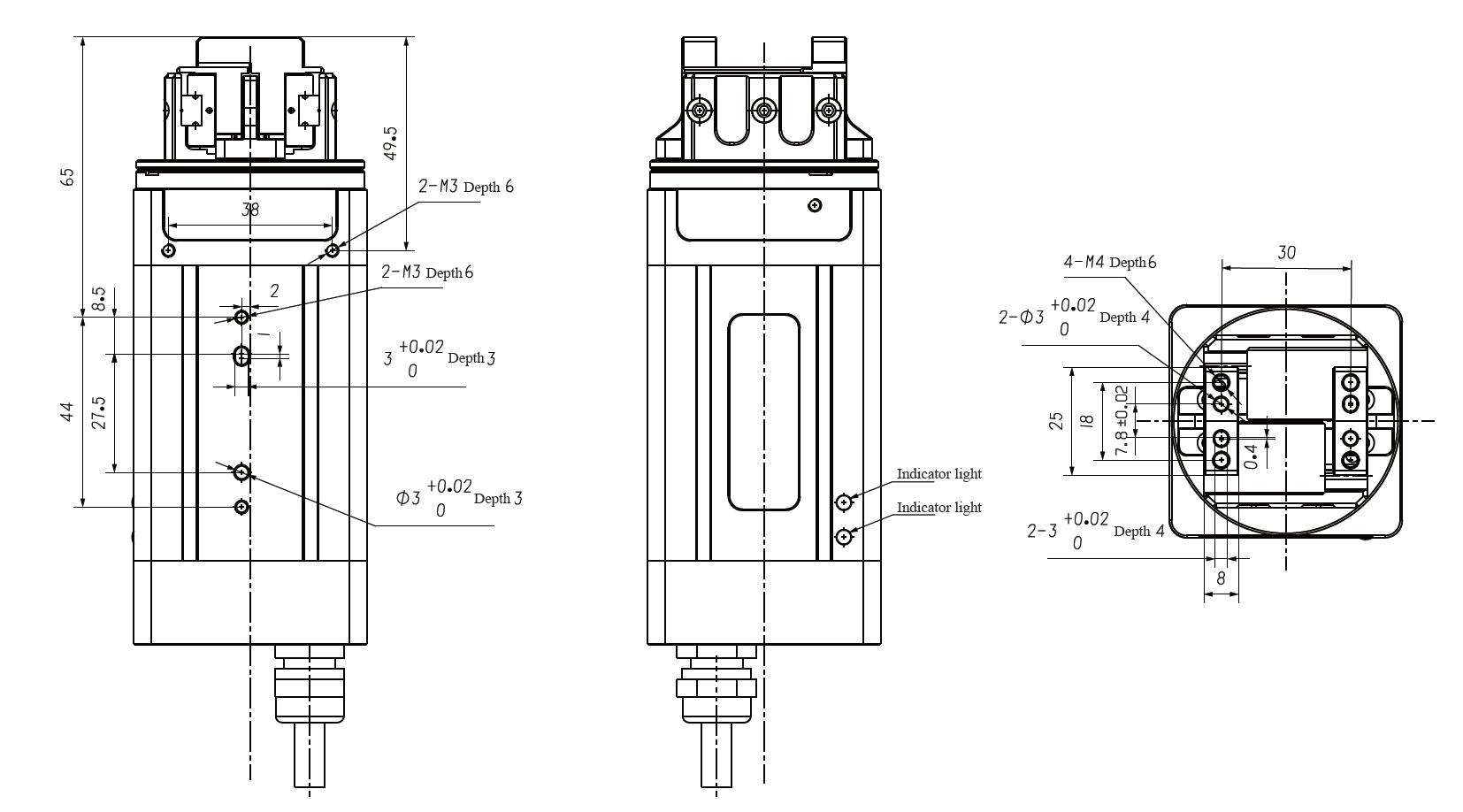
Диаграммаи насби андоза
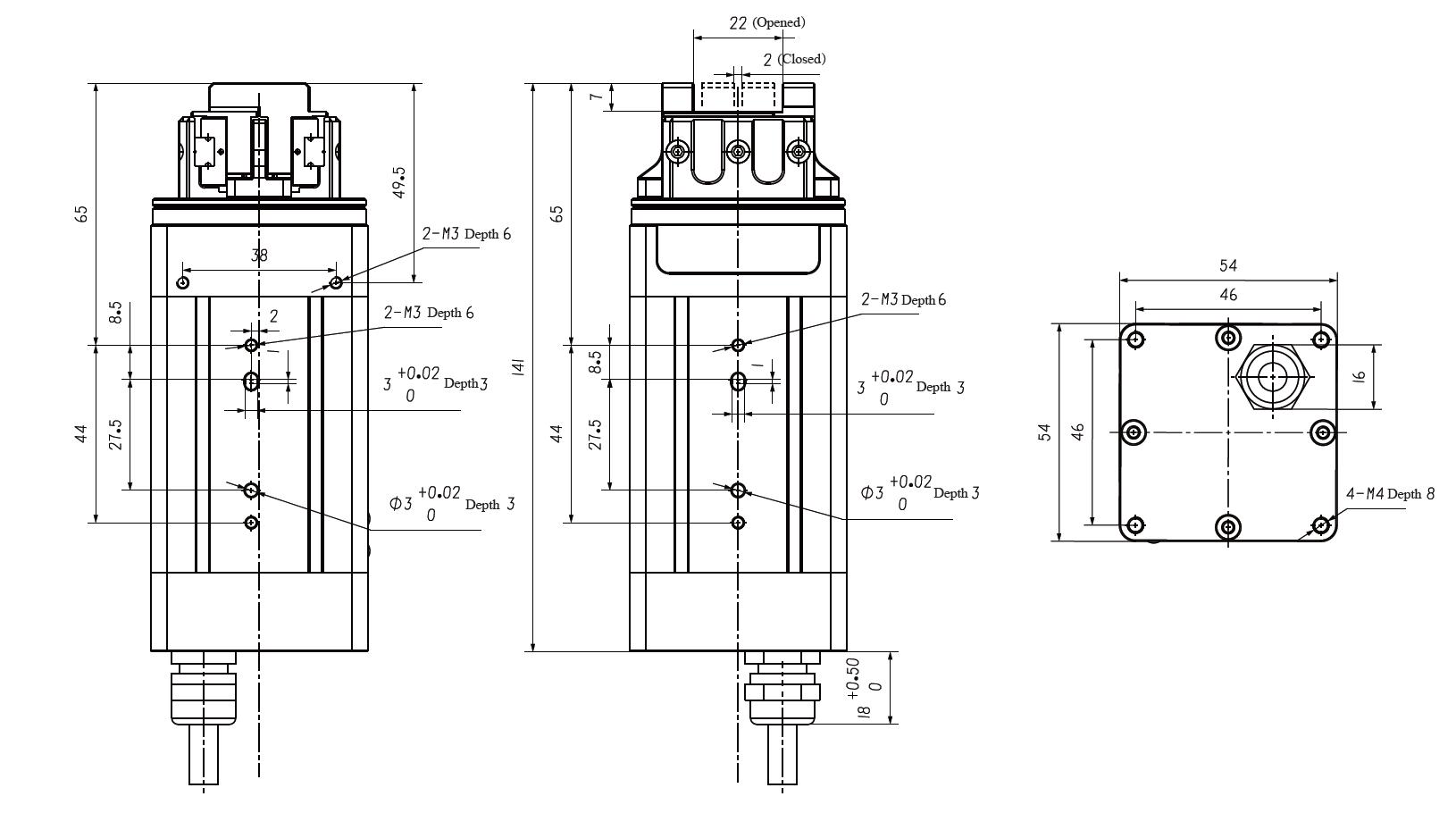
① RKMV8-354 Пайвасткунаки ҳавопаймоии панҷаслӣ ба RKMV8-354
② Зарбаи фишанги барқӣ 20 мм аст
③ Мавқеи насб, бо истифода аз ду винти M6 ба фланҷ дар охири бозуи роботи UR пайваст шавед
④ Мавқеи насб, мавқеи насби арматура (винти M6)
⑤ Мавқеи насб, мавқеи насби арматура (3 сӯрохии сӯзаншакли силиндрӣ)
Тиҷорати мо


Категорияҳои маҳсулот
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-40...
-

СИЛСИЛАИ МОДУЛИ ГИППЕР – FPT Се ангушт...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EMG-4 Параллелӣ...
-

СИЛСИЯИ ГРАППЕРИ ЭЛЕКТРИКИ HITBOT - Z-EFG-20 Paral...
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-C5...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...