Васлкунии арзон, паллеткунӣ, сайқалдиҳӣ, пошидан, коркард, кафшери инверторӣ, буридани аланга бо дастаки автоматии саноатии 6-меҳвари роботӣ
Васлкунии арзон, паллеткунӣ, сайқалдиҳӣ, пошидан, коркард, кафшери инверторӣ, буридани аланга бо дастаки автоматии саноатии 6-меҳвари роботӣ
Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза
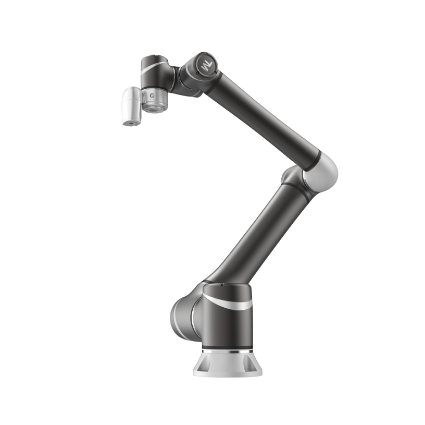
TM12 дар силсилаи роботҳои мо масофаи дарозтаринро дорад, ки имкон медиҳад, ки кори муштарак, ҳатто дар барномаҳое, ки дақиқии саноатӣ ва қобилиятҳои бардоштанро талаб мекунанд, анҷом дода шавад. Он як қатор хусусиятҳо дорад, ки имкон медиҳанд, ки онро дар наздикии коргарони инсонӣ бехатар истифода бурдан мумкин аст ва бидуни зарурати насб кардани монеаҳо ё деворҳои калонҳаҷм. TM12 интихоби аъло барои автоматикунонии коботҳо барои беҳтар кардани чандирӣ ва афзоиш додани...ҳосилнокӣ
Бо системаи биноии пешрафтаи синфӣ, технологияи пешрафтаи зеҳни сунъӣ, бехатарии ҳамаҷониба ва кори осон,Коботи зеҳни сунъӣ тиҷорати шуморо аз ҳарвақта пештар мебарад.Бо афзоиши ҳосилнокӣ, беҳтар кардани сифат ва кам кардани хароҷот, автоматикунониро ба сатҳи оянда бардоред.
Вижагиҳо
АҚЛ
Коботи худро бо зеҳни сунъӣ барои оянда омода кунед
• Санҷиши автоматии оптикӣ (AOI)
• Кафолати сифат ва мутобиқат
• Баланд бардоштани самаранокии истеҳсолот
• Хароҷоти амалиётиро кам кунед
ОДДӢ
Таҷриба талаб карда намешавад
• Интерфейси графикӣ барои барномасозии осон
• Ҷараёни таҳрири равандӣ
• Роҳнамоии оддии дастӣ барои таълими мавқеъҳо
• Калибровкаи визуалии зуд бо тахтаи калибризатсия
БЕХАТАР
Бехатарии ҳамкорӣ афзалияти мост
• Мутобиқи ISO 10218-1:2011 ва ISO/TS 15066:2016
• Муайянкунии бархӯрд бо қатъи фаврӣ
• Хароҷот ва фазо барои монеаҳо ва панҷараҳоро сарфа кунед
• Дар фазои кории муштарак маҳдудиятҳои суръатро муқаррар кунед
Коботҳои бо зеҳни сунъӣ коркунанда мавҷудият ва самти муҳити зист ва қисмҳои худро барои иҷрои санҷишҳои визуалӣ ва вазифаҳои динамикии интихоб ва ҷойгиркунӣ эътироф мекунанд. Зеҳни сунъиро ба осонӣ дар хатти истеҳсолӣ татбиқ кунед ва ҳосилнокиро афзоиш диҳед, хароҷотро кам кунед ва давраҳои давриро кӯтоҳ кунед. Биниши зеҳни сунъӣ инчунин метавонад натиҷаҳоро аз мошинҳо ё таҷҳизоти озмоишӣ хонад ва мувофиқан қарорҳои мувофиқ қабул кунад.
Илова бар беҳтар кардани равандҳои автоматикунонӣ, як роботи бо зеҳни сунъӣ идорашаванда метавонад маълумотро ҳангоми истеҳсолот пайгирӣ, таҳлил ва муттаҳид кунад, то аз камбудиҳо пешгирӣ кунад ва сифати маҳсулотро беҳтар созад. Автоматикунонии корхонаи худро бо маҷмӯи пурраи технологияи зеҳни сунъӣ ба осонӣ такмил диҳед.
Роботҳои ҳамкории мо бо системаи биниши муттаҳид муҷаҳҳаз шудаанд, ки ба коботҳо имкони дарки муҳити атрофро медиҳанд, ки имконоти коботҳоро ба таври назаррас беҳтар мекунад. Биниши робот ё қобилияти "дидан" ва тафсири маълумоти визуалӣ ба фармонҳо яке аз хусусиятҳое мебошад, ки моро бартарӣ медиҳад. Ин як чизи тағйирдиҳандаи бозӣ барои иҷрои дақиқи вазифаҳо дар фазоҳои кории динамикӣ тағйирёбанда, ҳамвортар кардани амалиётҳо ва самараноктар кардани автоматикунонии равандҳо мебошад.
Дониши барномасозӣ, ки бо дарназардошти корбарони нав тарҳрезӣ шудааст, шарти зарурӣ барои оғози кор бо зеҳни сунъии Cobot нест. Ҳаракати интуитивии клик ва кашолакунӣ бо истифода аз нармафзори барномасозии ҷараёнии мо мураккабиро коҳиш медиҳад. Технологияи патентшудаи мо ба оператороне, ки таҷрибаи рамзгузорӣ надоранд, имкон медиҳад, ки лоиҳаро дар муддати кӯтоҳи панҷ дақиқа барномарезӣ кунанд.
Сенсорҳои бехатарии дохилӣ ҳангоми ошкор шудани тамос бо ҷисмонӣ, зеҳни сунъии Cobot-ро бозмедоранд ва зарари эҳтимолиро барои муҳити бе фишор ва бехатар ба ҳадди ақал мерасонанд. Шумо инчунин метавонед барои робот маҳдудиятҳои суръат муқаррар кунед, то онро дар муҳитҳои гуногун дар паҳлӯи коргарони худ истифода бурдан мумкин бошад.
Маҳсулоти марбут



Муаррифии навтарин навовариҳои мо дар автоматикунонии саноатӣ - бозуи роботии худкори саноатии 10 кг. Ин бозуи роботии муосир барои инқилоб дар тарзи иҷрои вазифаҳои кафшер, буридан ва тозакунӣ дар муҳити саноатӣ тарҳрезӣ шудааст. Бо қобилиятҳо ва дақиқии пешрафтаи худ, бозуи роботӣ самаранокӣ, ҳосилнокӣ ва сифати раванди истеҳсолотро ба таври назаррас беҳтар мекунад.
Дасти роботӣ, ки бо технологияи муосир муҷаҳҳаз шудааст, қодир аст борҳои то 10 кг-ро интиқол диҳад ва барои доираи васеи замимаҳои саноатӣ мувофиқ аст. Новобаста аз он ки кафшери қисмҳои металлӣ, масолеҳи буриши дақиқ ё тозакунии дақиқи сатҳҳо, ин дасти роботӣ самаранокӣ ва эътимоднокии аълоро таъмин мекунад.
Нуктаи барҷастаи дасти роботӣ кори автоматии он аст, ки ниёз ба дахолати дастӣ-ро кам мекунад ва бо ин васила хатари хатогиҳои инсониро ба ҳадди ақал мерасонад ва бехатарии ҷои корро афзоиш медиҳад. Дақиқӣ ва такроршавандагии баланди он натиҷаҳои устуворро таъмин мекунад, ки боиси беҳтар шудани сифати маҳсулот ва сарфаи умумии хароҷот мегардад.
Илова бар ин, тарҳи паймон ва имконоти васлкунии бисёрҷонибаи дасти роботӣ имкон медиҳад, ки он ба осонӣ ба муҳитҳои мавҷудаи истеҳсолӣ ворид карда шавад ва бо дигар мошинҳо ва таҷҳизот бефосила кор кунад. Интерфейси қулай ва имконоти барномасозии фаҳмои он ба шумо имкон медиҳад, ки вазифаҳоро мувофиқи талаботи мушаххаси истеҳсолии худ ба осонӣ танзим ва танзим кунед.
Илова бар ин, дасти робот барои тоб овардан ба сахтиҳои истифодаи саноатӣ тарҳрезӣ шудааст, ки дорои сохтори пойдор ва кори боэътимод буда, кори дарозмуддатро таъмин мекунад. Талаботи пасти нигоҳдорӣ ва вақти зиёди корӣ самаранокии хароҷот ва пешниҳоди арзишро барои тиҷорат боз ҳам беҳтар мекунад.
Хулоса, бозуи роботии саноатии 10 кг як чизи муҳим барои автоматикунонии саноатӣ буда, имконоти беназирро барои корҳои кафшер, буридан ва тозакунӣ пешниҳод мекунад. Дақиқӣ, самаранокӣ ва эътимоднокии он онро барои истеҳсолкунандагоне, ки мехоҳанд равандҳои худро содда гардонанд ва дар бозори рақобатпазири имрӯза пешсаф бошанд, ба як дороии арзишманд табдил медиҳад. Ояндаи автоматикунонии саноатиро бо бозуҳои роботии пешрафтаи мо эҳсос кунед.
Параметри мушаххасот
| Модел | TM12M | |
| Вазн | 32.8KG | |
| Бори ҳадди аксар | 12 кг | |
| Дастрасӣ | 1300 мм | |
| Диапазонҳои муштарак | J1,J6 | ±270° |
| J2, J4, J5 | ±180° | |
| J3 | ±166° | |
| Суръат | J1,J2 | 120°/с |
| J3 | 180°/с | |
| J4 | 180°/с | |
| J5 | 180°/с | |
| J6 | 180°/с | |
| Суръати маъмулӣ | 1.3 м/с | |
| Суръати максималӣ | 4м/с | |
| Такрорпазирӣ | ± 0.1 мм | |
| Дараҷаи озодӣ | 6 буғуми гардишкунанда | |
| Вуруд/Хуруҷ | Қуттии идоракунӣ | Вуруди рақамӣ: 16 Баромади рақамӣ: 16 Вуруди аналогӣ: 2 Баромади аналогӣ: 1 |
| Пайвасткунии асбобҳо | Вуруди рақамӣ: 4 Баромади рақамӣ: 4 Вуруди аналогӣ: 1 Баромади аналогӣ: 0 | |
| Таъминоти барқи вуруд/хуруҷ | 24V 2.0A барои қуттии идоракунӣ ва 24V 1.5A барои асбобҳо | |
| Таснифи IP | IP54 (Дастаки роботӣ); IP32 (Қуттии идоракунӣ) | |
| Истеъмоли барқ | Иқтидори маъмулӣ 300 ватт | |
| Ҳарорат | Робот метавонад дар ҳарорати аз 0 то 50 дараҷа кор кунад. | |
| Тозагӣ | ISO Синфи 3 | |
| Таъмини нерӯ | 22-60 ВДС | |
| Интерфейси вуруд/хуруҷ | 3xCOM, 1xHDMI, 3xLAN, 4xUSB2.0, 2xUSB3.0 | |
| Муошират | RS232, Ethemet, Modbus TCP/RTU (мастер ва сардор), PROFINET (ихтиёрӣ), EtherNet/IP (ихтиёрӣ) | |
| Муҳити барномасозӣ | TMflow, бар асоси ҷадвали ҷараёнӣ | |
| Сертификатсия | CE, NIMSHI S2 (Интихобӣ) | |
| Зеҳни сунъӣ ва биниш*(1) | ||
| Функсияи зеҳни сунъӣ | Таснифот, Муайянкунии объектҳо, Сегментатсия, Муайянкунии аномалияҳо, OCR-и зеҳни сунъӣ | |
| Ариза | Ҷойгиркунӣ, Хондани штрих-коди 1D/2D, OCR, Муайян кардани нуқсонҳо, Андозагирӣ, Санҷиши васлкунӣ | |
| Дақиқии ҷойгиркунӣ | Мавқеъгирии 2D: 0.1 мм*(2) | |
| Чашм дар даст (дарунсохт) | Кармераи рангии худкор бо қарори 5M, масофаи корӣ 100 мм ~ ∞ | |
| Чашм ба даст (ихтиёрӣ) | Дастгирии ҳадди аксар камераҳои 2D-и 2xGigE ё камераи 2D-и 1xGigE + камераи 3D*(3) | |
| *(1)Дастҳои роботи биноии дарунсохт TM12X, TM14X, TM16X, TM20X низ дастрас нестанд. *(2)Маълумоти ин ҷадвал аз ҷониби лабораторияи TM чен карда мешавад ва масофаи корӣ 100 мм аст. Бояд қайд кард, ки дар татбиқи амалӣ, арзишҳои дахлдор метавонанд аз сабаби омилҳо ба монанди манбаи нури муҳити атроф дар макон, хусусиятҳои объект ва усулҳои барномасозии биниш, ки ба тағирёбии дақиқӣ таъсир мерасонанд, фарқ кунанд. *(3)Барои моделҳои камераҳои мувофиқ бо TM Robot ба вебсайти расмии TM Plug & Play муроҷиат кунед. | ||
Тиҷорати мо





