СИЛСИЛАИ ТАҒЙИРОТИ ЗУД – QCA-S500 Дастгоҳи зудтағйирдиҳанда дар охири робот


Категорияи асосӣ
Ивазкунандаи асбобҳои роботӣ / Ивазкунандаи асбобҳои нӯги даст (EOAT) / Системаи зудтағйирдиҳӣ / Ивазкунандаи автоматии асбобҳо / Интерфейси асбобҳои роботӣ / Тарафи робот / Тарафи дастак / Чандирии асбобҳо / Озодкунии зуд / Ивазкунандаи асбобҳои пневматикӣ / Ивазкунандаи асбобҳои барқӣ / Ивазкунандаи асбобҳои гидравликӣ / Ивазкунандаи асбобҳои дақиқ / Механизми қулфкунии бехатарӣ / Эффектори нӯг / Автоматизатсия / Самаранокии иваз кардани асбобҳо / Ивазкунии асбобҳо / Автоматикунонии саноатӣ / Асбобҳои роботии нӯги дастҳо / Тарроҳии модулӣ
Ариза
Асбобҳои нӯги даст (EOAT) дар соҳаҳо ба монанди истеҳсоли автомобилҳо, электроникаи 3C, логистика, қолаббандии тазриқӣ, бастабандии хӯрокворӣ ва дорусозӣ ва коркарди металл васеъ истифода мешаванд. Вазифаҳои асосии он коркарди қисмҳои корӣ, кафшер, пошидан, санҷиш ва иваз кардани босуръати асбобҳоро дар бар мегиранд. EOAT самаранокии истеҳсолот, чандирӣ ва сифати маҳсулотро ба таври назаррас беҳтар мекунад ва онро қисми муҳими автоматикунонии саноатии муосир мегардонад.
Хусусият
Дақиқии баланд
Тарафи танзимкунандаи дастаки поршен нақши мавқеъгириро мебозад, ки дақиқии баланди мавқеъгирии такрориро таъмин мекунад. Як миллион санҷиши даврӣ нишон медиҳад, ки дақиқии воқеӣ аз арзиши тавсияшуда хеле баландтар аст.
Қувваи баланд
Поршени қулфкунанда бо диаметри калони силиндр қувваи қулфи қавӣ дорад ва дастгоҳи зуди роботи SCIC қобилияти зидди моменти қавии дорад. Ҳангоми қулф кардан, ларзиш аз сабаби ҳаракати баландсуръат ба амал намеояд, ки аз нокомии қулф пешгирӣ мекунад ва дақиқии такрории ҷойгиркуниро таъмин мекунад.
Самаранокии баланд
Механизми қулфкунӣ бо тарҳи сатҳи бисёрконусӣ, ҷузъҳои мӯҳркунии дарозмуддат ва зонди тамосии эластикии баландсифат барои таъмини тамоси наздики модули сигнал қабул карда шудаанд.



Параметри мушаххасот
| Силсилаи тағйирдиҳандаҳои зуд | ||||
| Модел | Бори максималӣ | Дақиқии такроршавандагӣ (X, Y ва Z) | Қувваи қулфкунӣ @ 80Psi (5.5Bar) | Вазни маҳсулот |
| QCA-S500 | 500 кг | ±0.015 мм | 38000N | 23.4 кг |

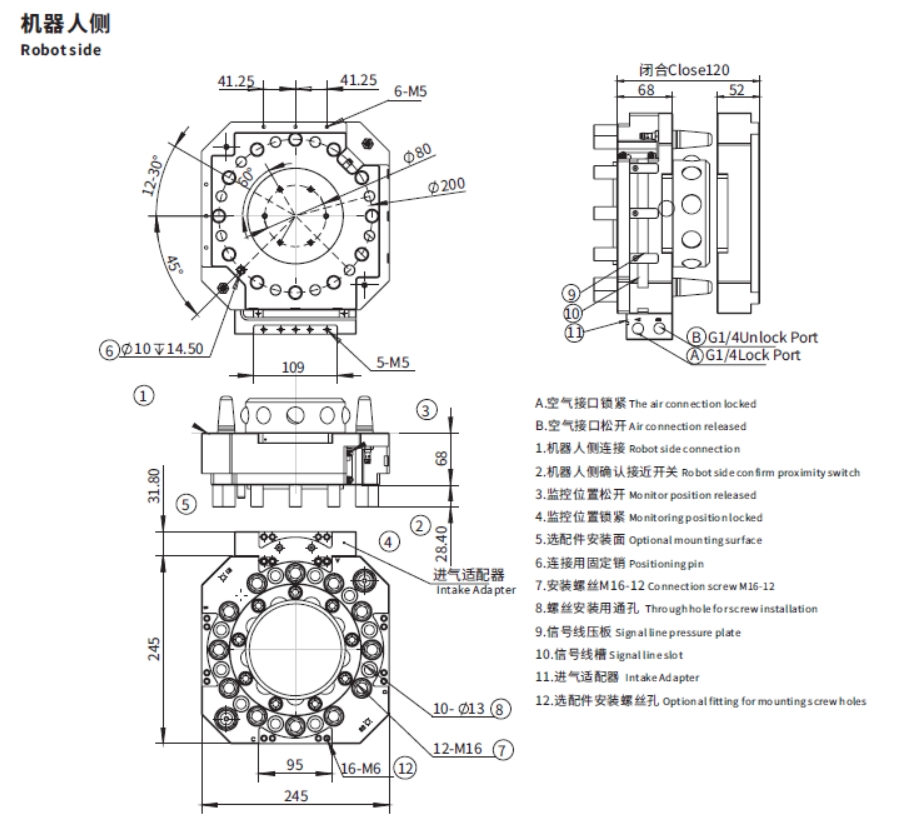
Тарафи робот
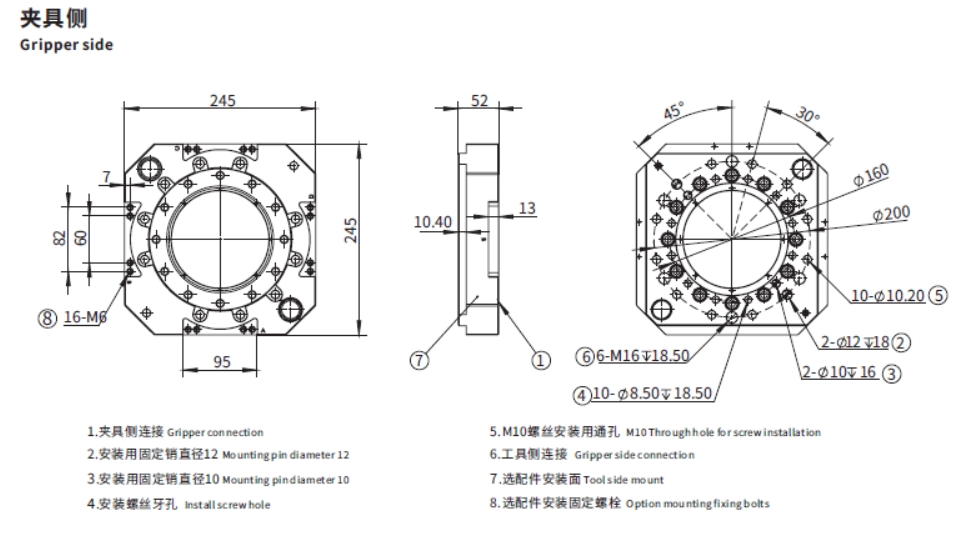
Тарафи дастак
Модули татбиқшаванда
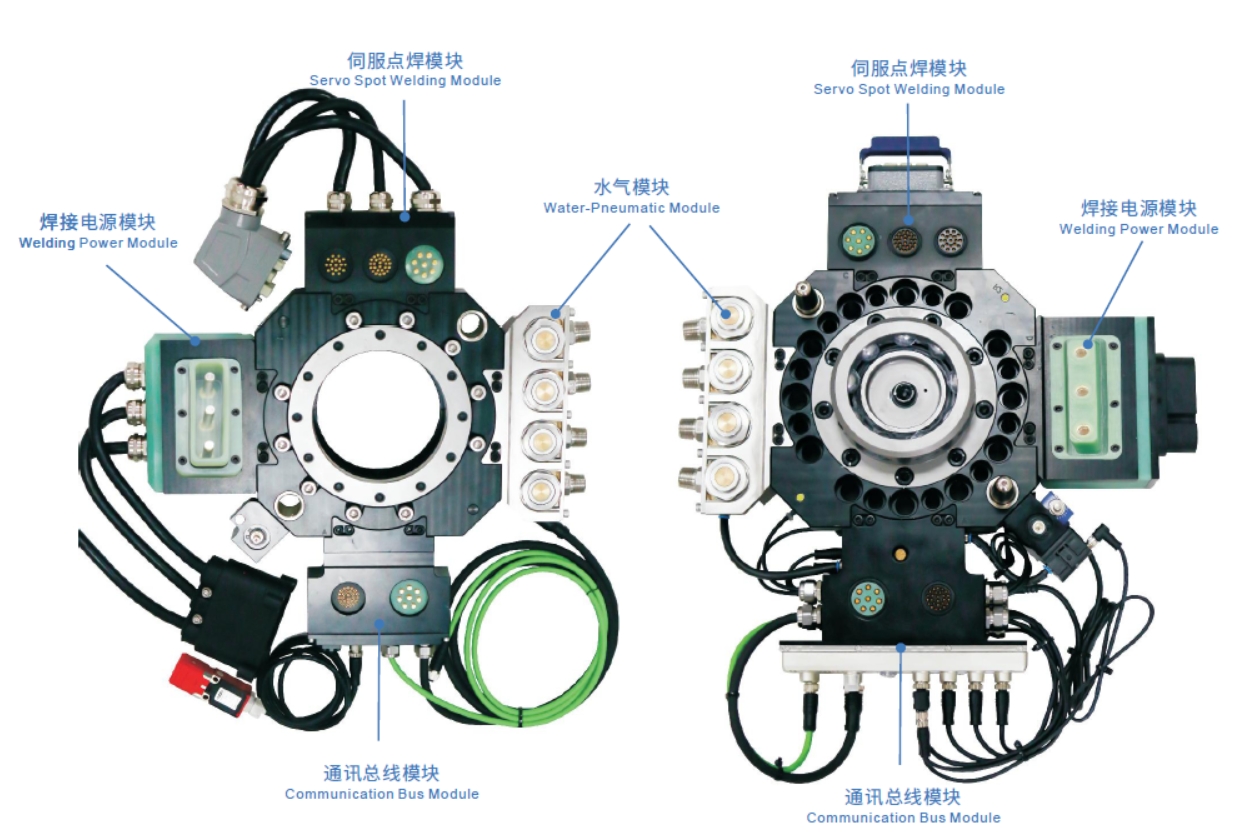
Модули барқи кафшер
| Номи маҳсулот | Модел | PN |
| Модули барқи кафшери тарафи робот | QCSM-03R | 7.Y02069 |
| Модули барқи кафшери тарафи дастак | QCSM-03G | 7.Y02070 |
Модули васеъкунии пневматикӣ
| Номи маҳсулот | Модел | PN |
| Модули васеъкунии пневматикии худкори робот | QCAM-08G38R | 7.Y02051 |
| Модули васеъкунии пневматикии худэълоншудаи тарафи Gripper | QCAM-08G38G | 7.Y02052 |
Модули роҳи обӣ
| Номи маҳсулот | Модел | PN |
| Модули роҳи обии тарафи робот | QCWM-04R1 | 7.Y02071 |
| Модули роҳи обии тарафи дастпӯшак | QCWM-04G1 | 7.Y02072 |
Тиҷорати мо







