СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – ГИППЕРИ ЭЛЕКТРИКИИ ПАРАЛИИ Z-EFG-20


Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастгири барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза
Дастгирҳои роботии силсилаи SCIC Z-EFG андозаи хурд доранд ва дорои системаи дарунсохти серво мебошанд, ки имкон медиҳад, ки суръат, мавқеъ ва қувваи фишурда дақиқ назорат карда шавад. Системаи пешрафтаи фишурдасозии SCIC барои роҳҳои ҳалли автоматикунонӣ ба шумо имкон медиҳад, ки имкониятҳои навро барои автоматикунонии вазифаҳое, ки шумо ҳеҷ гоҳ имконнопазир меҳисобидед, кушоед.

Хусусият

· Идоракунандаи дохилӣ
· Қувваи фишурдашаванда ва зарбаи танзимшаванда
·Қисмро барои мутобиқ шудан ба ниёзҳои гуногун иваз кардан мумкин аст
· Ашёҳои нозук ва деформатсияшавандаро ба монанди тухм гиред,найчаҳои озмоишӣ, ҳалқаҳо ва ғайра.
· Барои саҳнаҳое, ки манбаи ҳаво надоранд (масалан, лаборатория, беморхона) муроҷиат кунед
Дақиқӣ барои идоракунӣ, барои часпидан дар фазои хурд, зуд ва устувор барои часпидан
Қувваи бузурги фишурдакунӣ
Дарозии умумии зарба 20 мм, қувваи фишурдакунӣ 80N аст.
Дақиқӣ барои назорат
Такроршавандагӣ: ±0.02 мм
Давомнокии умр
Даҳҳо миллион давра, берун аз грифпери ҳавоӣ
Контроллер дарунсохт аст
Фазои хурдро ишғол мекунад, қулай барои ҳамгироӣ.
Реҷаи идоракунӣ
Контроллерҳои импулсӣ, вуруд/хуруҷ барои интихоб
Часпондани нарм
Он метавонад ашёҳои нозукро фишурда тавонад




Параметри мушаххасот
| Рақами модел Z-EFG-20 | Параметрҳо |
| Ҷамъ сакта | 20 мм |
| Қувваи фишурда | 30~80N |
| Такрорпазирӣ | ±0.02 мм |
| Вазни тавсияшудаи часпак | 0.8 кг |
| Интиқол режим | Рафи фишангдор + Роҳнамои ғалтаки салибӣ |
| Пур кардани равған барои қисмҳои ҳаракаткунанда | Ҳар шаш моҳ ё 1 миллион ҳаракат / вақт |
| Вақти ҳаракати зарбаи яктарафа | 0.45с |
| Диапазони ҳарорати корӣ | 5-55℃ |
| Диапазони намӣ дар амалиёт | RH35-80(Сармо нест) |
| Реҷаи ҳаракат | Ду ангушт ба таври уфуқӣ ҳаракат мекунанд |
| Назорати зарба | Танзимшаванда |
| Танзими қувваи фишурдан | Танзимшаванда |
| Вазн | 0.458 кг |
| Андозаҳо(Ч*Ч*Б) | 44*30*124.7мм |
| Ҷойгиркунии контроллер | Дарунсохт |
| Қудрат | 5W |
| Навъи муҳаррик | Бе хасу DC |
| Ҷараёни авҷӣ | 1A |
| Шиддати номиналӣ | 24В |
| Ҷараёни интизорӣ | 0.2A |
| Ба зарба тобовар / ба ларзиш тобовар | 98м/с |
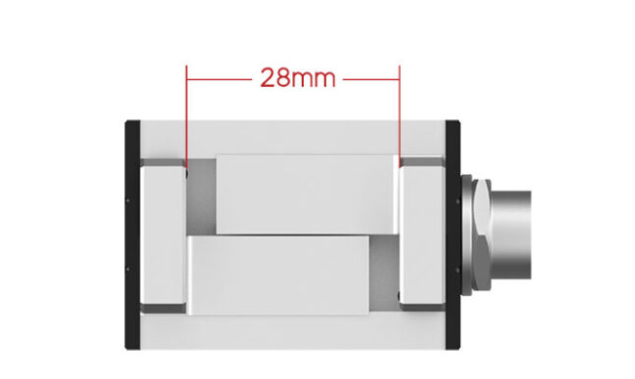
| Диаметри муҳаррик | 28 мм |
* Қувваи фишурдани Z-EFG-20: Қувваи фишурданро бо илова кардани маводи деформатсияи идорашаванда ба пеши арматура, ки мувофиқи каҷи мувофиқи деформатсия ва қувва ба даст оварда мешавад, танзим кардан мумкин аст.
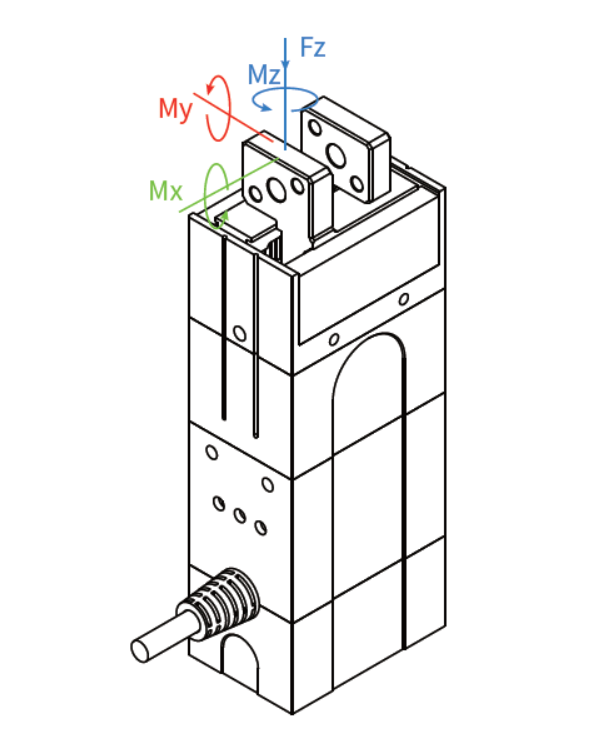
| Бори статикии иҷозатдодашуда дар самти амудӣ | |
| Фз: | 150N |
| Моменти гардиши иҷозатдодашуда | |
| Мкс: | 2.1 Нм |
| Ман: | 2.34 Нм |
| Мз: | 2 Нм |
Қувваи калони фишурдакунӣ, назорати қувваи дақиқӣ

Дастгоҳи барқӣ тарҳи махсуси интиқол ва ҷуброни ҳисобкунии ронандагиро қабул мекунад, қувваи фишурдани он 80N пайваста танзимшаванда аст, зарбаи умумӣ 20 мм ва такрори он ± 0.02 мм аст.
Ҳолати ҳаракат ва зарбаи танзимшаванда
Ҳаракати дастаки барқӣ ба ҳаракати мувозии ду ангушт тааллуқ дорад, кӯтоҳтарин вақти зарбаи ягонаи он ҳамагӣ 0.45 сония ва вазни фишурдан ≤0.8 кг аст, он метавонад ба талаботи фишурдани устувор барои хатти истеҳсолӣ ҷавобгӯ бошад.
Сохтори паймон, чандир барои насб.

Андозаи Z-EFG-20 L40 * W30 * H124.7mm аст, сохтори он паймон аст, зиёда аз панҷ ҳолати насбро дастгирӣ мекунад, контроллери он дарунсохт буда, фазои хурдро ишғол мекунад, ки иҷрои вазифаҳои гуногуни часпакро осон мекунад.


Ронандагӣ ва контроллери ҳамгирошуда, фишурдашавандаи нарм

Думи Z-EFG-20-ро ба осонӣ иваз кардан мумкин аст, муштариён метавонанд ашёи дархости худро часпанд, думро тарроҳӣ кунанд ва фишанги барқиро барои анҷом додани вазифаҳои часпидан ба ҳадди аксар нигоҳ доранд.
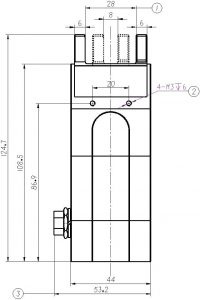
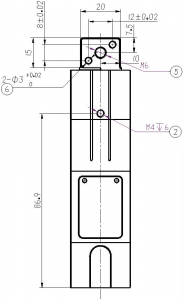
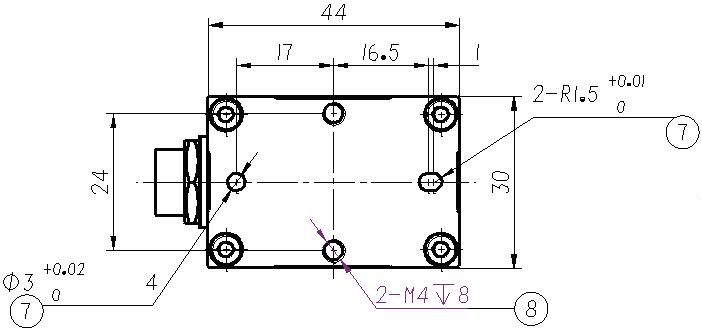
Диаграммаи насби андоза
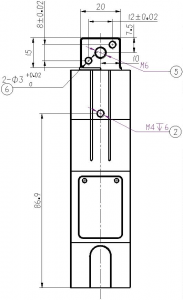
① Ҳаракати ангуштони дастак
② Мавқеи васлкунии паҳлӯӣ (сӯрохии риштадор)
③ Ҷойгиршавии симҳои васлкунаки ҳавопаймоӣ
④ Мавқеи қувваи танзими дастак (чап) ва чароғи нишондиҳанда (рост)
⑤ Мавқеи насби дастак (сӯрохии риштадор)
⑥ Мавқеи насби дастак (сӯрохии сӯзан)
⑦ Мавқеи васлкунии поёнӣ (сӯрохии сӯзан)
⑧ Мавқеи васлкунии поёнӣ ((сӯрохии риштадор)
Тиҷорати мо


Категорияҳои маҳсулот
-

СИЛСИЛАИ ГИППЕРИ ЭЛЕКТРИКИИ HITBOT – Z-EFG-C5...
-

Силсилаи PGE-и дастаки барқии сервои DH ROBOTICS –...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...
-

Силсилаи RGI-и дастаки барқии сервои DH ROBOTICS –...
-

DH ROBOTICS SERVO ELECTRIC GRIPPER SERIES PGC –...