ARMS-и роботии SCARA – Z-Arm-4160B Дасти роботии муштарак





Категорияи асосӣ
Дасти роботи саноатӣ / Дасти роботи муштарак / Дастаки барқӣ / Актуатори интеллектуалӣ / Ҳалли автоматикунонӣ
Ариза
Коботҳои SCIC Z-Arm роботҳои ҳамкории сабуки 4-меҳварӣ бо муҳаррики гардонанда дар дохили онҳо мебошанд ва дигар ба монанди дигар scara анъанавӣ ба коҳишдиҳандаҳо ниёз надоранд ва хароҷотро 40% кам мекунанд. Коботҳои SCIC Z-Arm метавонанд вазифаҳоеро, аз ҷумла чопи 3D, коркарди мавод, кафшер ва кандакории лазерӣ, иҷро кунанд. Он қодир аст самаранокӣ ва чандирии кор ва истеҳсоли шуморо ба таври назаррас беҳтар созад.
Вижагиҳо

Дақиқии баланд
Такрорпазирӣ
±0.02 мм
Меҳвари Z-и фармоишӣ
0.1-0.8м
Бори калон
Вазни 4 кг
Максимум 5 кг
Суръати баландтар
Суръати максималии хаттӣ 2м/с
(Бор дар ҳолати истода 5 кг)
Дасти калон, дасти роботии 4-меҳвари дақиқи баланд бо истифодааш осон
Дақиқии баланд
Такроршавандагӣ: ±0.02 мм
Дасти калон
Меҳвари J1: 325 мм,Меҳвари J2: 275 мм
Меҳвари Z-и фармоишӣ
Зарбаи боло-поёнро аз 0.1м то 0.8м танзим кардан мумкин аст
Сарфаи фазо
Драйв/Контроллер дарунсохт аст
Содда ва осон истифода
Барои шахси навкор, ки бо дасти робот ошно набуд, истифодаи он низ осон буда метавонад, интерфейс кушода мешавад.
Суръати баланд
Суръати он 2000 мм/с дар зери бори 4 кг аст.

Маҳсулоти марбут



Параметри мушаххасот
SCIC Hitbot Z-Arm 4160B аз ҷониби SCIC Tech тарҳрезӣ шудааст, он роботи ҳамкории сабук аст, барномарезӣ ва истифодааш осон аст, SDK-ро дастгирӣ мекунад. Илова бар ин, он ошкоркунии бархӯрдҳоро дастгирӣ мекунад, яъне ҳангоми ламс кардан ба инсон худкор қатъ мешавад, ки ин ҳамкории интеллектуалии инсон-мошин аст ва амният баланд аст.
| Дасти роботии муштараки Z-Arm 4160B | Параметрҳо |
| Дарозии бозуи 1 меҳвар | 325 мм |
| Кунҷи гардиши меҳвари 1 | ±90° |
| Дарозии бозуи 2-меҳвар | 275 мм |
| Кунҷи гардиши 2-меҳвар | ±164° Ихтиёрӣ: 15-345 дараҷа |
| Зарбаи меҳвари Z | Баландии 410 метавонад танзим карда шавад |
| Диапазони гардиши меҳвари R | ±1080° |
| Суръати хаттӣ | 2000мм/с (бори муфид 4кг) |
| Такрорпазирӣ | ±0.02 мм |
| Бори стандартӣ | 4 кг |
| Бори ҳадди аксар | 5 кг |
| Дараҷаи озодӣ | 4 |
| Таъмини нерӯ | 220V/110V50-60HZ мутобиқ ба қувваи авҷи 48VDC 960W |
| Муошират | Ethernet |
| Васеъшавӣ | Контроллери ҳаракати дарунсохт васеъшавии 24 вуруд/хуруҷ + зери бағалро таъмин мекунад |
| Меҳвари Z-ро дар баландии худ танзим кардан мумкин аст | 0.1м~0.8м |
| Таълими кашолакунии меҳвари Z | / |
| Интерфейси барқӣ захира карда шудааст | Конфигуратсияи стандартӣ: симҳои 24*23awg (бемуҳофизат) аз панели васлкунӣ тавассути сарпӯши бозуи поёнӣ Иловагӣ: 2 найчаи вакуумии φ4 тавассути панели васлкунак ва фланҷ |
| Дастпӯшакҳои барқии мувофиқи HITBOT | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Нури нафаскашӣ | / |
| Диапазони ҳаракати дасти дуюм | Стандарт: ±164° Ихтиёрӣ: 15-345 дараҷа |
| Лавозимоти иловагӣ | / |
| Муҳити зистро истифода баред | Ҳарорати муҳити зист: 0-45°C Намӣ: 20-80%RH (бе сармо) |
| Вуруди рақамии порти вуруд/хуруҷ (ҷудошуда) | Васеъкунии бозуи 9+3+ (ихтиёрӣ) |
| Баромади рақамии порти вуруд/хуруҷ (ҷудошуда) | Васеъкунии бозуи 9+3+ (ихтиёрӣ) |
| Вуруди аналогии порти вуруд/хуруҷ (4-20mA) | / |
| Баромади аналогии порти вуруд/хуруҷ (4-20мА) | / |
| Баландии дасти робот | 860 мм |
| Вазни дасти робот | Вазни холиси зарбаи 410 мм, 36.5 кг |
| Андозаи асосӣ | 250мм*250мм*15мм |
| Масофа байни сӯрохиҳои мустаҳкамкунии пойгоҳ | 200мм*200мм бо чор винти M8*20 |
| Ошкоркунии бархӯрд | √ |
| Таълими драгӣ | √ |
Интихоби беҳтарин барои корҳои васлкунии сабук
Z-Arm XX60B як бозуи роботии 4-меҳварӣ бо дарозии калони бозу мебошад, ки масоҳати хурдро ишғол мекунад, барои гузоштан дар ҷои кор ё дар дохили мошин хеле мувофиқ аст ва интихоби беҳтарин барои вазифаи васлкунии сабук аст.


Сабук бо кунҷи гардиши калон

Вазни маҳсулот тақрибан 36,5 кг аст, бори максималии он метавонад то 5 кг бошад, фариштаи гардиши меҳвари 1 ±90°, кунҷи гардиши меҳвари 2 ±164°, диапазони гардиши меҳвари R метавонад то ±1080° бошад.
Дасти калон, истифодаи васеъ

Z-Arm XX60B дарозии бозуи дароз дорад, дарозии меҳвари 1 325 мм, дарозии меҳвари 2 275 мм аст ва суръати хаттии он метавонад таҳти бори 4 кг то 2000 мм/с бошад.


Ҷойгиркунӣ чандир, ивазкунӣ зуд
Z-Arm XX60B дорои хусусиятҳои сабук, каммасрафи фазо ва чандирӣ барои ҷойгиркунӣ мебошад, он барои ҷойгиркунӣ дар бисёр барномаҳо мувофиқ аст ва тарҳбандии пешинаи истеҳсолотро, аз ҷумла пайдарпайии зуд ивазшавандаи равандҳо ва партияи хурди пурраи истеҳсолот ва ғайра, тағйир намедиҳад.
DragTeaching барои анҷом додани барнома

Нармафзор бар асоси тарроҳии графикӣ сохта шудааст, он нуқта, сигнали баромад, дастгоҳи барқӣ, табақча, таъхир, зерпротсессор, аз нав танзимкунӣ ва дигар модулҳои асосии функсионалиро пешниҳод кардааст, корбарон метавонанд модулро барои идоракунии дасти робот дар минтақаи барномасозӣ кашола кунанд, интерфейс содда аст, аммо функсия пурқувват аст.
Нусхаи M1 Диапазони Motion Diapazon (Гарм кардан ба берун)
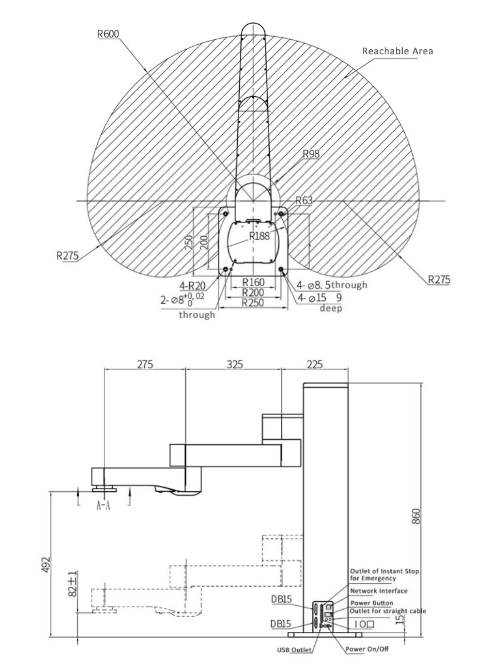
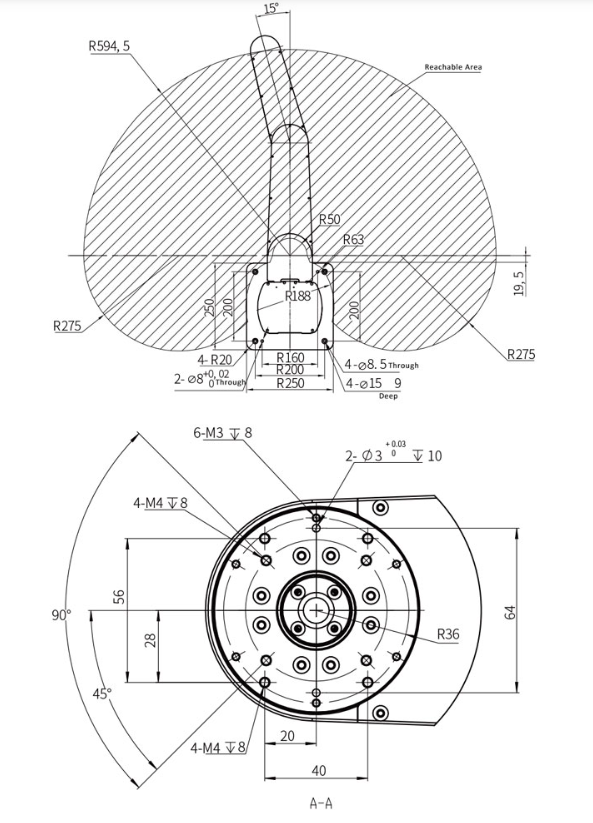
Тавсияи пайвасткунаки DB15

Модели тавсияшуда: Модели наринаи тиллоӣ бо пӯсти ABS YL-SCD-15M Модели наринаи тиллоӣ бо пӯсти ABS YL-SCD-15F
Тавсифи андоза: 55мм*43мм*16мм
(Ба расми 5 нигаред)
Диаграммаи муҳити истифодаи берунаи бозуи робот

Тиҷорати мо


Категорияҳои маҳсулот
-

СИЛСИЛАИ ТАҒЙИРОТИ ЗУД – QC-150 Дастгоҳи мудаввар...
-

РОБОТҲОИ ҶЕКИНГӢ – Роботи бардорандаи чархзанандаи SJV...
-

Борбардори интеллектуалӣ – SFL-CDD14-CE лазерӣ SLAM ...
-

СИЛСИЛАИ КОБОТИ AI – TM12M 6 меҳвари AI Cobot
-

СИЛСИЛАИ КОБОТИ AI – TM16M 6 меҳвари AI Cobot
-

СИЛСИЯИ ГРИППЕРИ ЭЛЕКТРИКИ HITBOT - Z-EFG-30 Paral...